硬钢整个行业!10月开始特斯拉彻底干掉所有汽车雷达传感器,底气何在?
“激光雷达就像是人身上长了一堆阑尾”;“激光雷达是傻子的玩意”拼命吐槽激光雷达等汽车雷达感知硬件的特斯拉,在这个国庆假期,做了个“疯狂”的决定:用纯视觉全面取代超声波传感器!之后,特斯拉汽车自动驾驶感知硬件只有摄像头(图像传感器),而没有任何雷达硬件!
今后,特斯拉新车将没有激光雷达、毫米波雷达、超声波雷达等自动驾驶“标配”传感器,这也意味着特斯拉在纯视觉自动驾驶的路上越走越远。
特斯拉从什么时候开始取消全部汽车感知雷达?对现今以激光雷达混合传感器为主流的ADAS方案有什么影响?特斯拉怎么用图像传感器和纯视觉方案代替雷达?
10月开始,北美、欧洲、中东和台湾制造的特斯拉汽车将没有任何感知雷达!中国大陆将在接下来几个月受到影响
10月4日,特斯拉发布了新车硬件配置的更新说明:不再在自动驾驶传感器套件中使用超声波传感器(USS),而是将采用完全基于摄像头的特斯拉视觉(Tesla Vision)驾驶辅助系统。
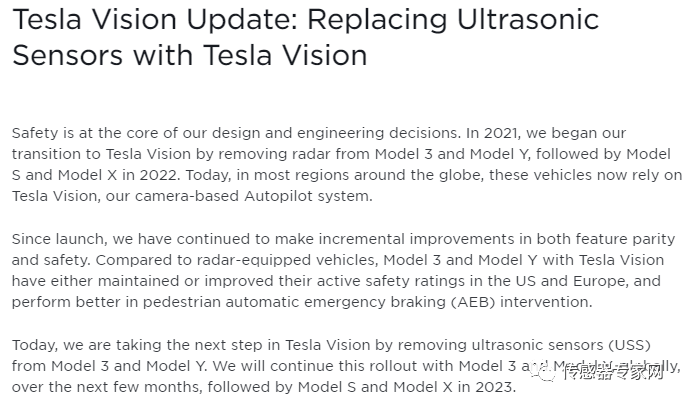
▲特斯拉硬件配置更新说明(来源 :特斯拉官网)
此处超声波传感器即超声波雷达,据说明中披露:从 2022 年 10 月上旬开始,为北美、欧洲、中东和台湾制造的所有 Model 3 和 Model Y 不再使用超声波传感器,而是完全依靠 Tesla Vision 来提供自动驾驶、增强型自动驾驶、FSD 功能和主动安全功能。
然后在接下来的几个月,超声波传感器的减配将在全球范围内的 Model 3 和 Model Y 进行,这里面显然包括中国市场。
到 2023 年, Model S 和 Model X也将加入超声波传感器减配行列。

疯狂吐槽激光雷达,全球首家没有任何雷达感知硬件的纯视觉自动驾驶公司诞生!
“激光雷达就像是人身上长了一堆阑尾”;“激光雷达是傻子的玩意”这是特斯拉CEO马斯克此前在公开场合多次吐槽激光雷达的原话。
马斯克认为,任何依靠激光雷达的企业注定没有未来,道路是为使用“眼睛”和“大脑”的人类设计的,汽车最好完全使用摄像头和人工神经网络来复刻这套行为模式。
基于这种思维,特斯拉拒绝了激光雷达,同时从自身的汽车感知硬件中,将非视觉感知硬件相继去除。
从2021年5月开始,特斯拉在全球移除了汽车的毫米波雷达,这一工作在2022年全部完成。
这次,特斯拉再次宣布移除汽车的超声波传感器,在特斯拉汽车的自动驾驶感知硬件中,将没有任何雷达硬件,这意味着特斯拉汽车成为全球首个纯视觉自动驾驶厂商。
特斯拉移除超声波雷达传感器后有什么影响?
目前,特斯拉 Model 3 与 Model Y 在前后保险杠上安装了 12 个超声波传感器,该短程声波传感器主要用于停车和检测近距离物体。特斯拉移除超声波传感器后,在安全和驾驶辅助功能中仅使用摄像头。

移除超声波传感器后会有什么影响?短期内,移除超声波传感器(USS)后,会有四个功能受到影响:泊车辅助、自动泊车、召唤、智能召唤。
泊车辅助:当车速<5英里/小时时提醒驾驶者周围的物体。
自动泊车:自动进入平行或垂直停车位。
召唤:通过特斯拉App向前或向后移动车辆。
但特斯拉表示这些功能的影响是暂时的,后续将会通过OTA更新来支持。

视觉派 VS 雷达派:特斯拉硬钢整个汽车行业
在自动驾驶领域,一直分为视觉派和雷达派,两大派系,最简单的区别就是:前者主张使用高清摄像头 + 视觉识别算法,后者主张除摄像头外,再加入激光雷达、超声波雷达、毫米波雷达等感知硬件提高信息冗余以保证系统稳定。
一套自动驾驶方案,主要由自动驾驶算法+感知硬件组成,感知硬件负责搜集足够多的车辆周围信息,以供算法进行运算。
在行驶过程中,车辆收集信息的来源,就是各种汽车感知传感器。其中,要实现自动驾驶,最为重要的传感器,就是摄像头(图像传感器)和激光雷达(当然,还要加上毫米波雷达和超声波传感器等的辅助)。
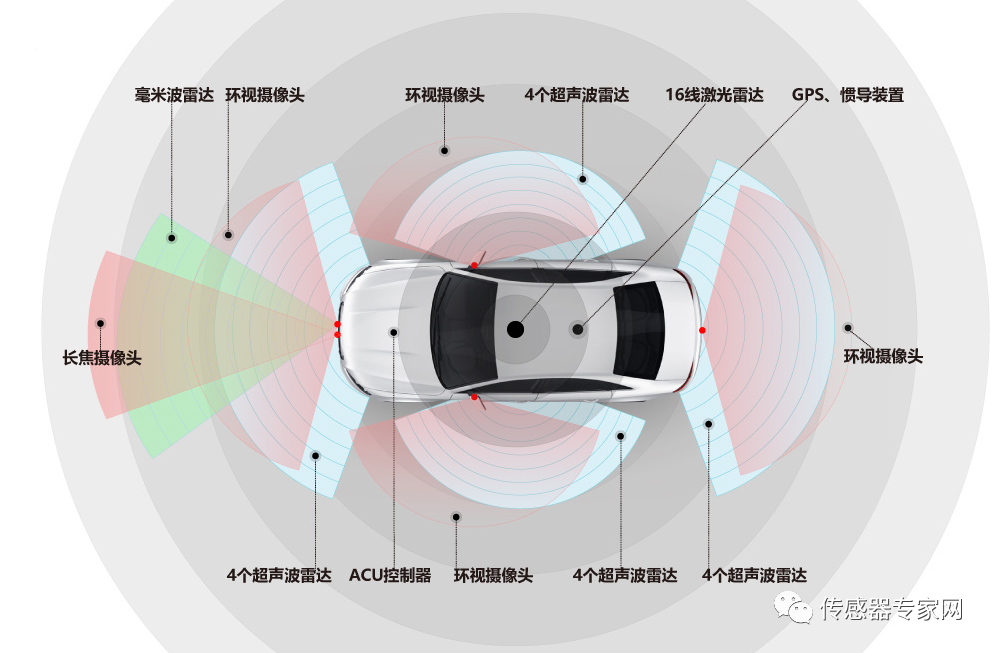
▲自动驾驶汽车感知传感器分布
视觉派,或者说纯视觉感知方案,其实就是完全模拟人驾驶汽车时的状态,首先由“眼睛(摄像头)”看到画面,然后传输给“大脑(处理器)”进行处理判断,然后给“腿脚(行驶机构)”下达命令。
目前,特斯拉是坚定的视觉派代表,除特斯拉外,其他车企大都有用到雷达等感知硬件进行辅助。
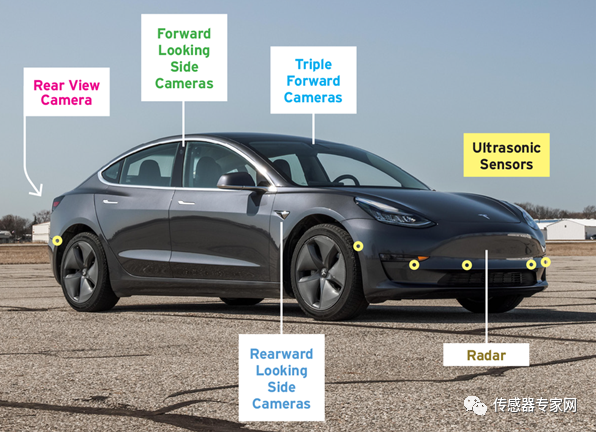
▲此前特斯拉的图像传感器+超声波传感器感知方案
雷达派,或者说激光雷达方案,是以激光雷达为主导,配合毫米波雷达、超声波传感器、摄像头来完成自动驾驶。包括发现物体、测距等一系列信息的获得,主要靠激光雷达来实现,从而绘制出一张3D环境地图来让系统进行分析和下达指令。
相对来说,这种方案更像是人在行走的同时,手里还拄着一根拐杖。
在自动驾驶中,激光雷达混合传感与纯视觉方案相比,有两个显著优势,一个是不受外部天气环境影响,另一个是不需要令人望而生畏的计算能力。这使得激光雷达受到很多车企的青睐。
当前除特斯拉外,绝大多数自动驾驶厂商均采用了这一方案,包括小鹏、蔚来、北汽ARCFOX、智己等。
其中,蔚来新车ES7搭载由InnoVusion提供的1550nm激光雷达“猎鹰 ”。北汽蓝谷和华为合作推出的极狐阿尔法S全新HI版搭载了3颗激光雷达、34颗传感器。小鹏新车G9搭载了2颗激光雷达,5颗毫米波雷达。售价60万元起步的高合HiPhi Z标配32个驾驶辅助传感器,包括:1个激光雷达、5个毫米波雷达、12个超声波雷达。百度第六代无人车RT6更是搭载了38个传感器,其中包含多达8颗激光雷达。

▲小鹏P5全球首款搭载激光雷达的量产车型
成本 VS 算力:纯视觉与激光雷达融合传感方案的优劣
纯视觉方案的优势在于,摄像头获取的视频数据与人眼感知的真实世界最为相似,也最接近人类驾驶的形态。同时,在现阶段激光雷达价格居高不下的情况下,视觉派仅使用摄像头,更容易控制成本。
另外,摄像头捕捉到的图像很适合用于识别物体、进行分类,在算法出色的情况下,能够有效排除干扰项,并能够在行驶过程中进行自主学习。
▲特斯拉的纯视觉算法分析示意图
但是,作为与人眼相似的视觉算法,很容易受到光照影响,在极端天气或者光线不好的情况下,很容易造成误判。之前特斯拉车型在开启AutoPilot后,经过立交桥或者普通桥梁之下时偶发突然自动刹车的情况,就是因为算法将摄像头里突然出现的阴影当做障碍物导致的。
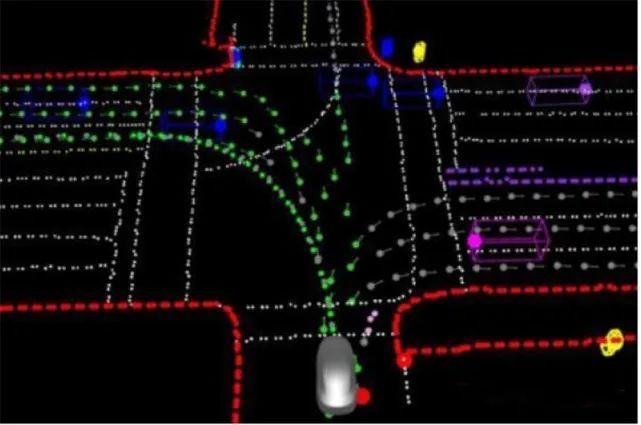
而相比纯视觉方案,激光雷达方案的优势就是监测的距离更长,精度更高,响应速度更灵敏,并且不受环境光影响。其对三维信息的处理,对物体大小、移动速度的计算都有着非常优异的表现。
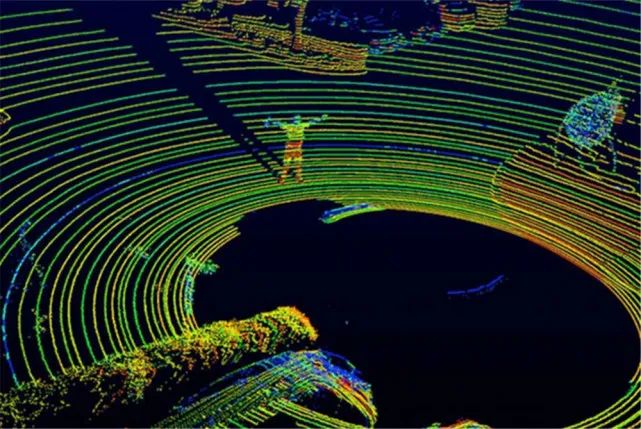
▲激光雷达绘制3D环境地图的效果图
不过,激光雷达也并非尽善尽美,它也存在对物体的识别能力偏弱、价格高昂、在雨雪等极端天气测距精度会受影响等问题,因此激光雷达必须要借助其他传感器收集的信息,才能共同作用于算法,保证安全驾驶。
此外,大量的数据收集,对处理器的算力要求也很高,这相当于抬高了整车的成本。
从理论上来说,视觉技术和激光雷达相互结合是目前较为完善的方案,但在综合现有技术、产品成本等多个因素后,想要实现融合两种方案的“第三种方案”难度过大。也正是基于此背景,自动驾驶领域才分为了视觉派和激光雷达派这“立场鲜明”的两派,而马斯克和他的特斯拉则坚定不移地“站队”视觉派。
为什么彻底抛弃雷达?特斯拉的取舍
1、高昂的成本
其实,弃用激光雷达,乃至如今弃用毫米波雷达,特斯拉做出如此选择的重要原因之一是为了实现更低的成本。
毕竟,激光雷达的成本非常高,早期的机械式激光雷达价格动辄十万美元起,而如今随着电子行业的发展,激光雷达的价格有所降低,但基本还维持在几百到上千美元的级别,但这相比高清摄像头“仅有”几十甚至十几美元的价格还是高了许多。

▲某款国产激光雷达
2、技术的取舍
不过,成本以外,特斯拉逐步弃用雷达的选择,也有技术层面的取舍。
首先,激光雷达无法判断物体的具体性质,就容易造成误判。比如一个大的塑料袋从前面飘过,摄像头方案能够识别出是塑料袋,然后不理会,但激光雷达会判断为阻碍物,然后把车停下来。
其次,毫米波雷达同样也有多限制。毫米波雷达的探测距离受到其频段损耗的直接制约,既无法识别行人,也无法对周边所有障碍物进行精准的建模,同时由于获取的数据量众多,还需要分走处理器宝贵的算力。
最后,对于在视觉方案方面目前走得最远也是做得最好的特斯拉来说,已经在视觉算法方面有了庞大的投入。要放弃之前如此大的积累,转身去做另一条路线,从投入产出比来说可谓“得不偿失”。
结 语
随着本次特斯拉推进移除超声波传感器的工作,全球首个采用纯视觉方案的自动驾驶汽车诞生了。
纯视觉方案虽然成本更低,同时与人的驾驶习惯和操作更为相近,但同时在恶劣天气、部分暗光环境等,也面临了与人一样的干扰和困境。
但毫无疑问,纯视觉的特斯拉汽车,已经为整个自动驾驶和汽车行业带来了巨大的冲击,也为自动驾驶带来更多的可能性。纯视觉自动驾驶表现如何?让我们拭目以待!
您对本文有什么看法?欢迎留言分享!
顺手转发&点击在看,将中国传感产业动态传递给更多人了解!
