受鼹鼠蟹启发美国研究人员开发出可自主挖掘的机器人
美国加州大学伯克利分校的研究人员推出了一种可垂直自主挖掘的腿式机器人EMerita BUrrowing Robot(EMBUR),其灵感来自太平洋鼹鼠蟹(Emerita analoga)。
EMBUR采用新颖的腿部设计,模仿太平洋鼹鼠蟹将自身埋入沙子中的方式实现垂直向下挖掘,未来可用于各种行业和研究领域,包括测量潜在农业场地的土壤质量、岩土工程、海洋数据收集以及建筑和挖掘等。此外,它们还可以用作海上交通工具或太空漫游车的小型可展开锚,以允许机器人之间的团队合作。
通过 EMBUR,伯克利的研究人员表明,在适当的条件下,在干燥的介质中可以进行垂直挖洞。他们认为这是朝着创建一个可以在更广泛的条件和基质类型下挖洞系统迈出的第一步,比如在真正的海滩上。获 取 更多前沿科技?研究 进展访问:https://byteclicks.com
研究团队计划改进设计,以便进行更深入的挖掘和探索更好的建模方法,如 DEM [离散元方法],以帮助预测机器人的行为,最终,他们希望这个机器人能够像动物一样在真实的海滩环境中挖掘,并在跑步、游泳和挖掘之间切换。
相关研究成果发表在《机器人与人工智能前沿》(Frontiers in Robotics and AI)期刊上。
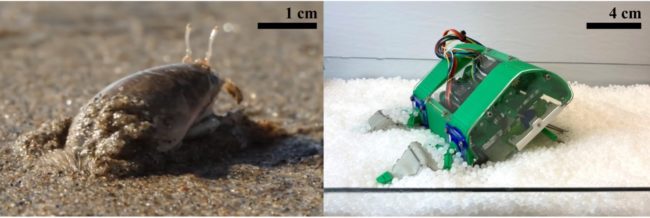
太平洋鼹鼠蟹在湿沙的天然基质中的图像(左),与用于测试的干基质中的受鼹鼠蟹启发的机器人 EMBUR 形成对比(右)。
版权声明:除特殊说明外,本站所有文章均为 字节点击 原创内容,采用 BY-NC-SA 知识共享协议。原文链接:https://byteclicks.com/42240.html 转载时请以链接形式标明本文地址。转载本站内容不得用于任何商业目的。本站转载内容版权归原作者所有,文章内容仅代表作者独立观点,不代表字节点击立场。报道中出现的商标、图像版权及专利和其他版权所有的信息属于其合法持有人,只供传递信息之用,非商务用途。如有侵权,请联系 gavin@byteclicks.com。我们将协调给予处理。
赞
