激光雷达赛道:成也技术,败也技术
2022年10月,成立25年的全球激光雷达(lidar)巨头Ibeo宣告破产。其业界地位之高有目共睹:技术先进,市场份额全球第四。而先进是要高昂研发费用去支撑的,长达24年创业历程,Ibeo只获得了两轮外部融资;2010年,Ibeo就拿到了奥迪订单,却花了7年时间才量产交付;直到2020年才拿到第二个项目长城汽车,但已无济于事。
Ibeo的方案很是激进:4D固态激光雷达,没有任何运动部件,传感器更轻、结构更紧凑,适用于L2-L5级自动驾驶。但其技术价格非常高昂。破产之前Ibeo希望和奥迪合作研发,但最终以失败告终。Ibeo超前的全固态方案具有量产成本高、冗余系统难做、维护成本高等明显缺点,让一众主机厂望而却步,先进技术也无以为继。
反观国内激光雷达行业融资潮持续火爆,禾赛科技、速腾聚创、镭神智能、一径科技、北醒、牧镭激光、洛微科技、锐驰智光……背后的投资方阵容十分庞大。根据IDTechEx最新预测,2033年全球自主车辆激光雷达市场将增长至84亿美元,市场前景乐观。
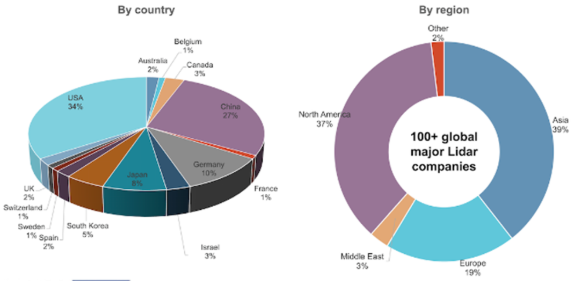
全球激光雷达厂商地区分布
让更多的机器看到世界
激光雷达的作用是光探测和测距,在激光发明后不久即已出现,已广泛应用于测绘、测量、军事、考古学、农业和地质等领域。光束控制技术的发明使得激光雷达能够在扩展使用场景中探测3D空间。
3D激光雷达是一种光学感知技术,使机器能够看到世界,做出相应决策和导航。目前,使用激光雷达的机器从小型服务机器人到大型自主车辆。不过,快速发展的激光雷达技术和市场留下了许多不确定的问题,系统中的每一个组件的技术前景都有点杂乱无章的。

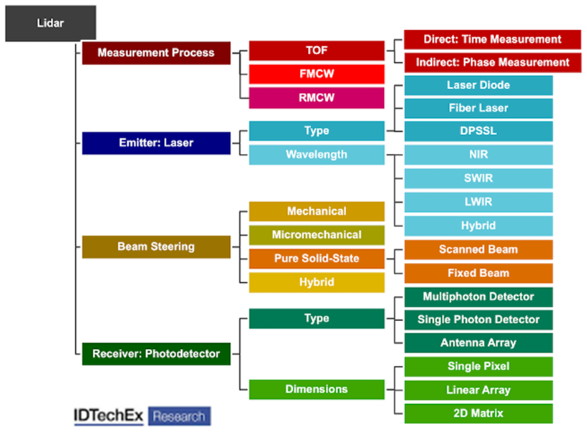
汽车激光雷达厂商技术分布(包括已停止运营的公司)
事实上,每个激光雷达厂商和用户都必须做出四项重要技术选择:测量过程即激光测距原理、发射器(激光器)的光源和波长、激光束照亮场景的光束控制机制,以及接收器(光电探测器)测量光线的方法。光束控制机制是最复杂和关键的选择,而发射器和接收器在未来激光雷达的成本降低和性能进一步提高中起重要作用。
设计或选用3D激光雷达模块的四个重要技术选择
通过对关键部件和测量方法的众多技术选择,可以产生各种技术组合,使厂商的产品与众不同。
然而,这些选项并不是无限的。某些组件可能与特定技术配合得更好,与边缘发射激光器(EEL)相比,例如垂直腔表面发射激光器(VCSEL)是3D闪光激光雷达更受欢迎的选择。由于更多的技术挑战,MEMS和FMCW的组合较少。
今天所做的技术选择将对未来激光雷达的性能、价格和可扩展性产生巨大影响。激光雷达市场的现状是不可持续的,因为获胜的技术和厂商的出现将巩固技术和商业前景。
特斯拉的唯视vs传感器融合
作为一家具有代表性的公司,特斯拉站在唯视阵营一边,而大多数汽车制造商都在追求传感器融合,并将激光雷达作为未来的解决方案。冗余需求和对3D信息不断增长的需求使激光雷达越来越具有吸引力。汽车ADAS和自动驾驶汽车市场的竞争可以为激光雷达提供一个被市场接受的机会,从而降低价格并提高可靠性。从材料供应商到主机厂,激光雷达供应链的努力不仅为传统材料和组件公司提供了创新机会,还为消费者带来了新的生活方式。
光学3D传感的常用方法和工艺变化如下:
飞行时间
通过红外光脉冲从物体反射并由图像传感器检测时测量的飞行时间来计算深度,即直接飞行时间(dToF)法。另一种方法使用调制(如正弦)红外光源并根据反射光中的相位变化计算深度,即间接飞行时间(iToF)方法。
结构光法
通过三角测量来计算深度,即传感器将投影仪发射的红外光的预定义图案成像到物体上,用来计算3D深度。而通过使用多个图案(可编程结构光)而不是单个图案(固定结构光),可以显著提高深度精度和深度分辨率。
立体视感
也是通过三角测量计算深度,两个传感器从不同角度对物体成像,并通过识别图像中的匹配点来重建3D图像。这与人类的视觉相似;每个传感器是一只眼睛。使用被动立体视觉对无纹理物体进行成像是一项挑战。主动立体视觉方法包括投影仪,可以通过投射红外光的随机图案来添加纹理。
几个关键技术比较
首先看MEMS驱动,分类包括静电、电磁、压电陶瓷和电热式。需要关注驱动电压、驱动电流、功耗、旋转扭矩、制造复杂性、线性度、光学偏转角(谐振)、光学偏转角(非谐振)、速度和特性。
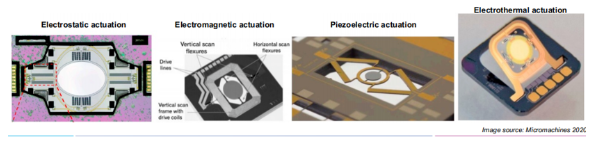
四种类型MEMS驱动
再看液晶光学相控阵,电子科技大学(UESTC)的研究人员开发的LC-OPA(液晶光学相控阵)示例。作为一种结合了微波相控阵天线技术与液晶电光特性的新型无机械波束扫描控制器件,它具有驱动电压器、功耗低、重量轻、抗振动、抗辐射干扰、大孔径和性价比高等优点,在激光雷达和空间光通信等领域具有重要的应用前景和应用价值,已成为光学相控阵中的研究热点。
左图显示了LC-OPA的结构和相位剖面。线性偏振光入射到两个玻璃基衬底之间的LC层,当通过周期性电极阵列施加电场时,LC分子旋转,电极阵列通过改变局部折射率产生光栅。入射激光束根据相移曲线偏转,相移曲线取决于施加在每个电极上的电压。D为LC层厚度,d为电极周期,Δφ为两个电极之间的相移。右图显示使用2个级联LC-OPA形成和控制多波束。
从半导体角度看,这是一种同质结和异质结器件之间的不同。传统激光二极管具有下图上部所示的基本同质结设计。掺杂的半导体层在p型层中形成具有额外正电荷(空穴)和在n型层中具有额外负电荷(电子)的p-n结。光学腔位于两个平面反射器表面之间,光在有源区中产生并在腔中放大。同质结器件需要在低温下工作,以防止高阈值电流密度造成的损坏。
现代激光二极管通常采用双异质结构(下图下部),就像“三明治”,可以在室温下工作。其有源层位于限流层之间并形成p-n结,限流层也称为包层(cladding)。因为其折射率高于包层且其带隙小于包层,光子和电荷载流子被限制在有源层中。
至于红外发射器,它是发射IR的器件,移动设备最常见的方式包括发光二极管(LED)、边缘发射激光器(EEL)和垂直腔表面发射激光器(VCSEL)。下图显示了三者的比较。二极管在电流通过时发光。IR LED可以发射IR光。相反,激光器与LED的区别在于不同的相干性。
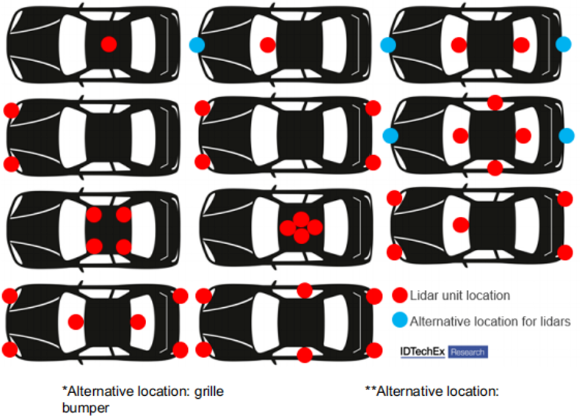
Level 3+自动驾驶车辆的激光雷达配置示例
对于传统EEL,光发射是通过激光器的切割边缘,通常是一个接一个地处理,因此难以大量集成。与传统EEL相反,VCSEL的激光束垂直于顶面发射,因此可以大量集成。
写在最后
据Yole《2022年汽车与工业领域激光雷达报告》称,中国在全球汽车激光雷达市场中处于领先地位,中国供应商已成为这一领域的佼佼者。中国和外国激光雷达公司之间存在着重要差异:国外激光雷达公司依赖于外部制造,而中国的速腾聚创和禾赛拥有自己的制造能力,正在助推中国公司实现大批量生产。
未来,随着新技术的不断涌现和专用芯片的应用,激光雷达产品在性能上仍有提升的可能,在成本上也有降低的空间,激光雷达有望迎来更强劲增长。
1
