美国科学家研究环形软体机器人可在狭窄缝隙中导航
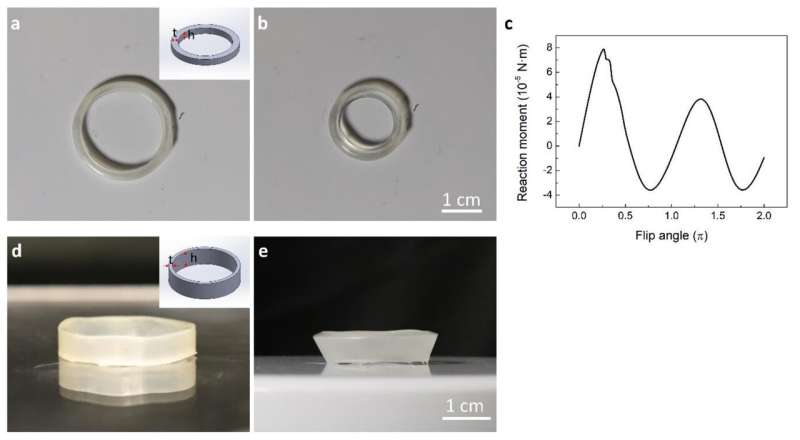
(a, b)?厚度?(t)?和高度?(h)?相等的环只能折断两次并收缩到最小尺寸。(c)?通过?FEA?模拟的半径为?15 mm?的环的翻转反应力矩。(d, e) h = 5t?的环?(d)?放置在热表面上时会转变为静态的喇叭状形状而不会折断?(e)。图片来源:先进材料(2022)。DOI:10.1002/adma.202207372
美国北卡罗来纳州立大学的研究人员创造了一种环形软体机器人,在暴露于高温或红外光时能够爬过表面。研究人员已经证明,这些 "环形机器人 "能够拉着一个小的有效载荷穿过表面--在环境空气中或在水中,以及穿过比其环形尺寸更窄的间隙。
这些环形机器人由液晶弹性体制成,呈环形带状,类似于一个手镯。当你把环形机器人放在一个至少55摄氏度(131华氏度)的表面上,这比环境空气更热,丝带接触表面的部分会收缩,而暴露在空气中的部分则不会。这在色带中引起了滚动运动。
同样,当研究人员将红外光照在环形机器人上时,暴露在光线下的色带部分会收缩,而被遮挡的部分则不会。这也会诱发彩带的滚动运动。在实际应用中,这意味着当爬行的环形机器人放在一个热的表面上时,它从下往上移动。但当暴露在红外光下时,运动则从上往下开始。
推动这种连续运动的原因之一是,环形机器人是双稳态的,也就是说,当它处于静止状态时有两种形状。如果带状物开始扭曲,它要么扣回原来的形状,要么向前扣入另一种双稳态。
想象一下一个形状像丝带的橡胶手镯。如果你把手镯的两端向前折一下,然后松手,它就会弹回原来的形状。但是,如果你把两端折得足够远,它就会折过来--基本上是把手镯从里面折出来。
在环形机器人的情况下,"折叠 "是通过施加持续的热量或红外光,使弹性体收缩和旋转来完成。如果环形机器人是对称的,这基本上会使它在原地跳舞。
关于这项工作的论文的通讯作者、美国北卡罗来纳州立大学机械和航空航天工程的副教授Jie Yin说:"但是通过对环形的工程设计,使环形的一侧永久扭曲,结构是不对称的。这意味着环状物不均匀地暴露在热或红外光下,这导致软体机器人在表面上横向移动。"
当放在一个热的表面上时,最终的结果是爬行的环形机器人拉着自己向前走。但是当暴露在红外光下时,爬行环形机器人会将自己向前推。可以把它看作是前轮驱动与后轮驱动。
在演示中,这些环形机器人能够拉动一个小的有效载荷,并且在环境空气和水下都能工作。
研究人员还证明,环形机器人可以调整其身体形状,以挤过一个比环形机器人直径窄30%以上的狭窄空间。而当间隙太窄,软体机器人无法通过时,它就会调整方向,远离间隙。
实验室的博士后研究员Yao Zhao说:"这是一个基本的进步,而不是以特定的应用为目的的设计。我们正在展示当'物理智能'被设计到材料和结构本身时可以实现什么,允许它在没有计算输入的情况下移动和导航空间。"
这篇论文发表在《先进材料》杂志上。
