Portescap:应用于AMR微型电机的领先制造商


作者: Portescap公司的 Pradeep Deshmane(首席工程师)和 Manoj Pujari(首席工程师)
无论是移动或定位物体,进入危险环境,处理医疗废物等危险材料,还是仅仅在家里帮忙,都对自主移动机器人有着巨大的需求。它们不仅能完成人类劳动难以完成的、重复的或不方便的任务,而且能正确地执行这些任务,在需要精确性的地方尤其有效。本文对自主移动机器人进行了概述,描述了它们的操作、市场需要和需求、应用要求、选择标准、设计优化和未来进展。
AMR(自主移动机器人)的操作和热门应用
AMR在地面上导航,使用电动轮子来推动自己。与使用踏板或腿的机器人不同,AMR更容易设计、建造和编程,以便在平坦、不那么崎岖的地形上移动。它们在消费市场上特别受欢迎,因为它们的差速转向装置价格低廉,实施简单。机器人可以有任何数量的轮子,但三个轮子足以实现静态和动态平衡。额外的轮子可以增加平衡;然而,将需要更多的机构来保持所有的轮子在地面上--特别是当地形不平坦的时候。运动系统包括与驱动车轮的齿轮箱相耦合的电机,这增加了扭矩能力,以获得更好的驾驶性能。
除了在消费市场上的广泛使用,AMR还可以在医院里发现,执行感染控制、医疗服务、医疗废物运送、生化标本运送和一般医疗任务。它们还被部署在全球范围内对抗COVID-19大流行病的斗争中。另一个不断增长的市场是在航空航天和国防(A&D)行业,机器人在监视和军事行动中发挥着关键作用。在石油和天然气(O&G)行业,由于它们能够拍摄结构的内部以帮助识别裂缝或故障,预计它们将成为管道检查的宝贵工具。
申请要求
在大多数应用中,运动系统通常必须满足以下要求:
●体积小,重量轻
●高扭力
●耐用和长寿命
●低噪音,特别是用于医疗和 A&D 设备时
●高效率和低电流
AMR中的运动系统通常由有刷或无刷直流电机和紧凑型行星齿轮箱组成。此要求可能因应用而略有不同,但运动系统通常具有以下规格:
●电机:空心杯有刷直流或无刷直流电机
●变速箱配置:行星;? 级,30:1 至 120:1 比例
●包装尺寸:<40 mm2
●变速箱输出扭矩:4 至 8 Nm
●变速箱输出转速:50 至 150 rpm
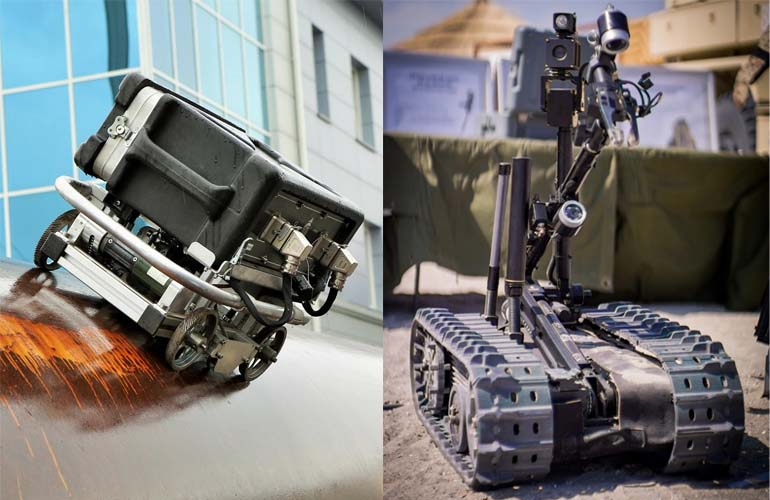
图 1. AMR的两种常见轴配置。
选择标准
选择电机和齿轮箱的第一步是确定产品的运行条件和最大条件。因此,您需要确认车轮输出端所需的速度和扭矩。
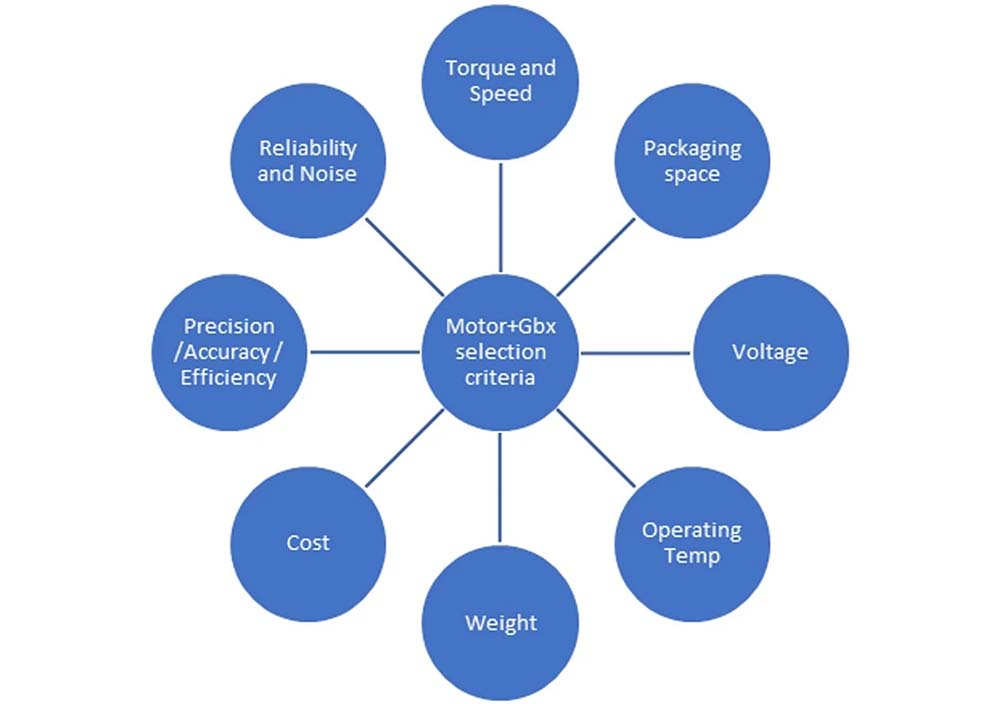
图 2. 为AMR设计选择电机和变速箱时要考虑的重要方面。
扭矩??首先,确定所需的输出扭矩,然后逆向查找您的电机和传动装置。轮子上的扭矩应基于机器人加速度、轮子直径和承载能力。确保承载能力能够在某些执行器发生故障或车轮打滑的情况下拉动整个机器人,以及要克服的最小坡度和潜在障碍。摩擦和效率也应该考虑到最终的扭矩计算中。
速度??为了计算轮子需要旋转的速度,您必须为轮子定义所需的速度或最终输出。根据这些信息,您可以选择电机和齿轮。机器人制造商一般会最终确定机器人的驱动速度,轮径决定了轮子输出端所需的速度。
包装空间??确保由编码器、制动器、电机和齿轮组成的电机组适合机器人并且可以干净地包装。编码器可让您测量电机轴转动了多少,制动系统有助于保持扭矩并在紧急情况下提供动态停止。
电压??工作电压用于为电机供电。通常,电压越高,电机的速度能力就越高。电机的数据表将提供电压常数——也称为反电动势常数——因此您可以计算电机每伏特的旋转速度。
工作温度??虽然温度通常不是问题,但确保您的电机组不会过热仍然很重要——尤其是在封闭的情况下。变速箱是另一个值得关注的领域,因为随着时间的推移,温度会影响其润滑寿命和性能。
重量??负载的质量也决定了电机选择的扭矩。因此,您需要估计质量或知道实际质量才能选择电机。如果您的设计基于质量估算,我们建议应用 25% 的安全裕度。请参考电机数据表中提供的扭矩常数,以计算每安培可实现多少扭矩输出。
成本??虽然从头开始构建齿轮箱可能更便宜,但设计、组装和测试新齿轮所需的时间和精力可以使标准齿轮箱成为更经济的选择。
精度、准确性和效率??您可以承受多少滞后?通常,根据所涉及的地形和扭矩曲线,轮式电机机器人应用的精度和准确度可能会稍低一些。而且,由于并非所有应用都需要低噪音或低振动等高性能特性,因此可以容忍较低的精度。然而,机械臂或仪器通常需要更精确和准确的低背隙系统。
可靠性和噪音??大多数应用需要更高的可靠性,因此电机组必须能够承受所需的工作点。监控机器人等一些关键应用需要低噪音和更高的可靠性,电机和齿轮箱必须同时满足这两个标准。
选择最佳设计
以下是使用 Portescap 设计的运动系统的自主移动机器人应用示例:
●电机:有刷 DC 35 GLT
●主变速箱:行星变速箱,3 级,正齿轮,99.8 总变速箱比
许多AMR采用差动转向,依靠单独驱动的轮子进行运动。另一种设计是具有两对动力轮的四轮驱动机器人,由于每对都可以朝同一方向转动,因此提供了更多的平衡。但是,如果两人的速度不同,机器人就会移动缓慢,无法直线行驶。最佳设计具有类似于汽车中使用的差动转向机构,它允许机器人左转或右转,只需要一个电机。另一种常见的机器人配置使用独立驱动轮子的电机,而不是差动转向。在这种情况下,需要单独的电机来驱动每个车轮。总体系统规格为:
●包装:32 -mm2 x 115 mm 长
●变速箱输出扭矩容量:8 Nm
●变速箱输出转速:80 rpm
●预期寿命:1,000 小时
●最高温度:125°C
Portescap 产品(如图 3 所示)提供更小的封装、更高的扭矩承载能力和更高的耐用性,使其非常适合广泛的自主机器人应用。

图 3. 带齿轮箱的 Portescap 有刷直流 35 GLT 电机。
AMR的未来发展
AMR并非没有缺点。例如,它们不能很好地穿越多岩石的地形、陡峭的斜坡或低摩擦区域。为了让机器人克服这些限制,必须修改驱动架构以包括诸如带履带的差动驱动系统、滑移转向四轮驱动系统或两轮加被动脚轮差动驱动系统的机制。然而,这些架构增加了更多的复杂性,需要对其成本影响进行详细研究。
在整体架构没有重大变化的情况下,机器人设计人员必须将精力集中在优化运动系统上。以下进步有助于提高AMR在耐用性、效率和降噪方面的性能:

图 4. 滚针轴承
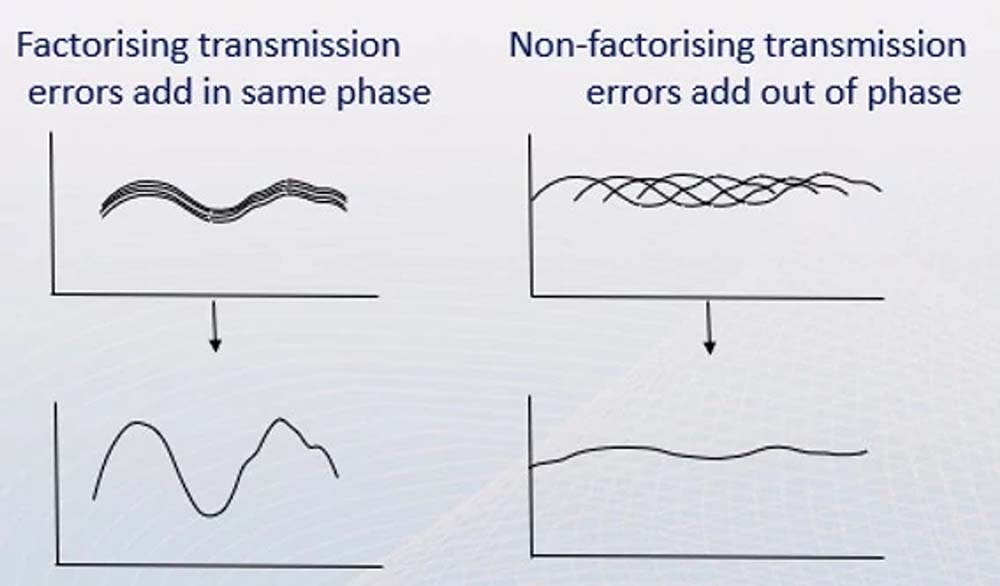
图 5. 低噪声齿轮箱的转换误差分析
高级组件??滚针轴承,例如图 4 中所示的轴承,可避免磨损故障并确保行星齿轮在行星销上平稳旋转。此外,某些齿轮箱的齿轮齿布置成可降低扭力以降低噪音。
基于 FEA 的高级分析??结构分析有助于识别潜在故障并在设计过程的早期消除它们。图 6 显示了一个示例。
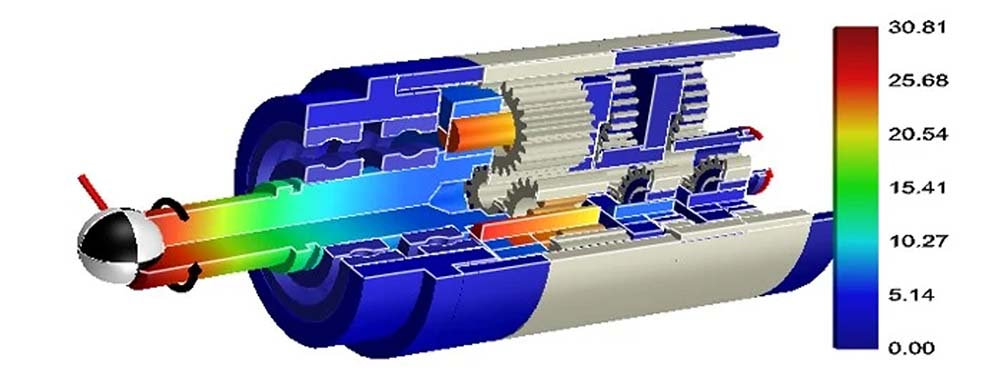
图 6. 高级 FEA 分析。
高级声学模拟。使用软件预测噪声(例如图 7 中的仿真)有助于优化需要低噪声的关键应用的设计。
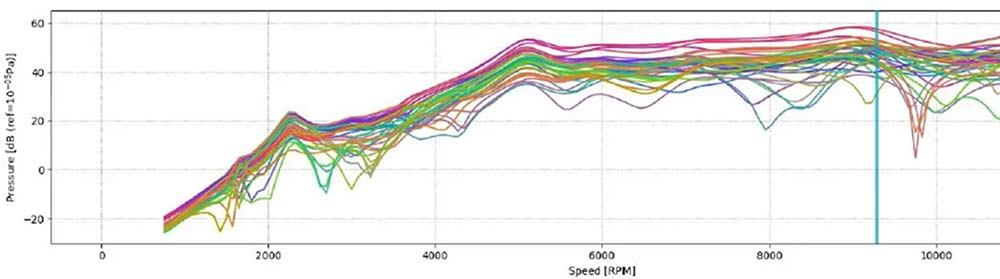
图 7. 高级声学模拟
与合适的电机供应商合作
随着机器人在工业和家庭中成为我们生活中不可或缺的一部分,AMR将处于发展的最前沿。为了让您的AMR应用程序实现精度和最佳性能,您需要合适的运动组件。Portescap 提供范围广泛的标准和定制微型电机,具有高扭矩密度、可靠性和效率以及工程支持,以确保您的自主移动机器人系统可以到达需要的地方并完成工作。
关于瑞士Portescap公司进入企业商铺
Portescap 起源于瑞士,以对精度、以客户为中心的创新、卓越的技术和最优质的服务充满热情,已成为微型电机和精密运动控制解决方案领域公认的领先专家。从医疗设备到各种节省、改善和改善生命的工业应用,Portescap 提供微型电机技术,以解决各种终端市场的运动需求。我们通过广泛的创新产品技术为客户提供服务,包括无刷直流,有刷直流,罐堆叠电机,盘式磁铁电机和步进线性执行器,以优化应用性能。我们的产品采用紧凑的封装,具有高效率和低功耗。
基于卓越制造的传统,并以对创新的热情为动力,我们利用70多年的运动解决方案经验,将精确的动力放在最小的地方。我们与全球客户在产品设计的每个阶段都进行合作 - 从选择最佳运动解决方案到定制产品以满足他们的应用需求。我们的全球制造足迹和遍布全球的应用中心使我们能够快速响应客户需求,并提供本地支持和协作。
