法国Exwayz公司在CES展示其声称可引导 1 亿个机器人的导航软件


Exwayz将展示其首个指导1亿个自主机器人的即插即用软件。这款多合一、不可知、功能强大的软件能够通过三维数据处理实时计算移动机器人的位置和方向。
Exwayz是即插即用三维空间智能软件的先驱,今天发布了Exwayz SLAM,其新一代软件简化并加速了自主系统中的三维激光雷达集成。这是第一个提供基于LiDAR的定位堆栈的完全软件解决方案,符合行业在稳健性方面的需求。这款强大的软件不需要LiDAR专业知识,而且成本低廉,与传感器无关,适用于任何移动机器人的使用案例,如自主送货、车辆或物流。它通过优化和3D视觉方面的尖端创新,实现了前所未有的稳健性和精确到厘米的水平。由于有了Exwayz SLAM,移动机器人的智能通过整合先进的3D感知成为现实。欢迎进入机器人移动性的新时代!

在CES上的实时演示 - LVCC西厅(法国商业公司展位5400)
应对自主导航的技术挑战
●多样性:在室内和室外都可使用,不受GPS限制的配置。
●准确。定位精度(小于2厘米)。
●以SDK的形式提供,可实现无缝集成。
●已经被Innoviz、Cepton和Ouster等行业领导者使用的领先LiDAR制造商所信任。
到2030年,全球工业每年将需要1亿个自主移动机器人[1],无论是搬运、工业检查、交付还是自主运输。主要的挑战是提供先进的三维感知,这是自主性的基本前提。更具体地说,机器人需要在一切之前知道它在环境中的准确位置。
LiDAR,一个明显的但无法获得的自主导航解决方案
LiDAR已经迅速成为自主机器人技术的感知传感器,因为它能够提供准确的环境三维表示(即扫描),即使在恶劣的天气条件下,如无光或雾,以及在拒绝GPS的环境中。然而,在现实世界的使用案例中实施基于LiDAR的解决方案的现实情况可能仍然令人生畏。多年来,LiDAR数据处理一直是一个巨大的挑战,即使是有经验的工程团队在必须实时完成时也会受到挑战,而绝大多数机器人用例都是如此。这使得LiDAR很难得,尽管在过去的几年里聚集了大量的关注,而且公认是在各种环境中进行精确导航的最佳解决方案。今天,Exwayz的解决方案对于那些将激光雷达传感器集成到他们的系统中的人来说是一个游戏规则的改变。
Exwayz的首席执行官Hassan Bouchiba说:"我们很自豪地在今年的CES上介绍我们的新软件Exwayz SLAM,旨在为自主系统制造商节省多年的艰苦软件开发。近年来,无论是在学术研究还是在工业项目上,LiDAR SLAM,实现自我定位和测绘已经被谈论得很多了。现实情况是,只有通过强大、准确、可靠和真正实时的算法才能实现自主,而这正是目前现有解决方案中所缺乏的关键要素。我们通过在市场上推出Exwayz SLAM来改变游戏规则,这是第一个符合行业需求的软件,它在你自己的系统上的表现与我们在Youtube上的视频一样好。“
Exwayz SLAM已经在指导真正的自主系统
Exwayz SLAM与传感器无关,即插即用,大大简化了3D LiDAR传感器在任何移动机器人应用中的使用。机器人制造商可以依靠Exwayz软件为他们的系统进行2厘米精确的自我定位,而不需要任何3D数据处理方面的专业知识。
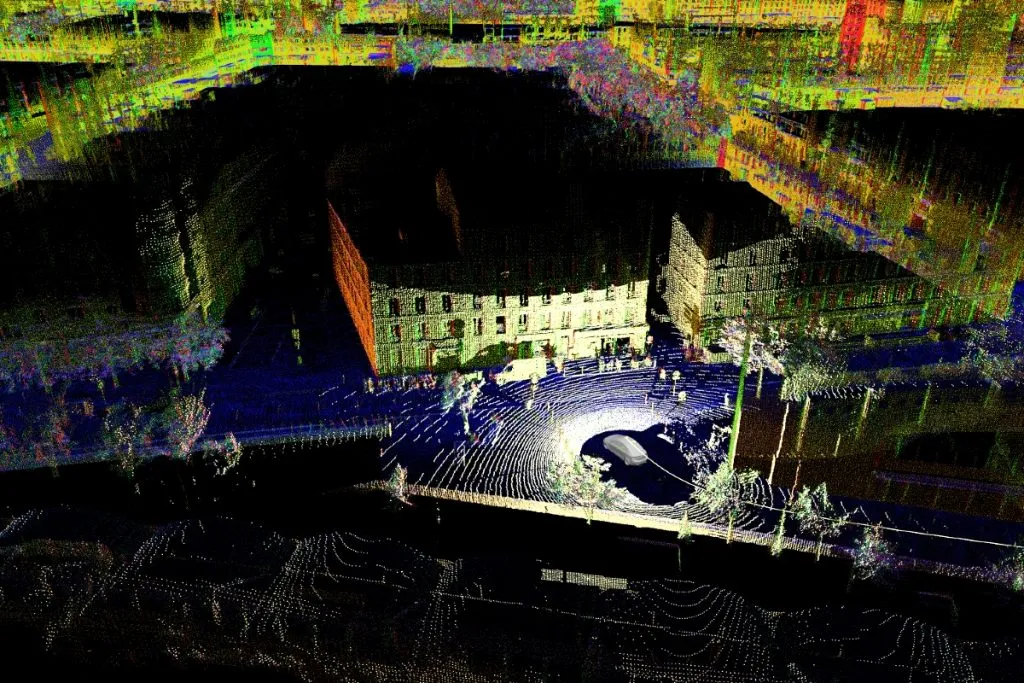
使用 Exwayz SLAM 的自主重定位示例:第一个 3D 地图(彩色)是使用 Exwayz SLAM 算法创建的。当前的 LiDAR 数据(白色)正在地图上重新定位,这就是地图上存在完美重叠的原因。这允许计算系统的轨迹(白线),即系统在每个时刻的确切位置和方向。
Exwayz SLAM 已经部署在世界各地的多个机器人上,用于各种用例。
例如,一些拣选机器人在大型物流仓库中全天候 24/7 运送包裹,并借助 Exwayz SLAM 找到了自己的路。物流领域的公司渴望将这些吃力不讨好的任务委托给机器人,因为他们很难找到人来完成这些任务。机器人也可用于检查难以进入或危险的区域。例如,Exwayz SLAM 用于在放射性区域中导航一些机器人,以领导措施活动,以检测人类的污染风险。SLAM 做出贡献的另一个有意义的例子是自主运输。我们都知道这个领域的大牌,但也有许多小公司正在开发未来的自动驾驶交通工具;不仅是汽车:还有火车。
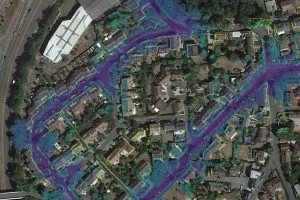
由于密集的 3D 点云是 SLAM 的副产品,各种地理空间玩家使用 Exwayz 软件生成基础设施的 3D 厘米表示,这些对于创建数字孪生至关重要,因此对准确的资产管理有广泛的帮助。
与领先的 3D LiDAR 制造商和软件提供商建立多项合作伙伴关系
Exwayz 已经与 Ouster、Cepton 和 Innoviz 等领先的 3D LiDAR 传感器制造商签署了战略合作伙伴关系,以加速自主机器人的开发,为未来的智能系统结合最好的硬件和软件技术。Exwayz 还与嵌入式软件行业的两个主要参与者 dSpace 和 Intempora 合作,以在其客户站点实现更简单、更安全的 Exwayz SLAM 软件集成。
工作原理:SLAM 如何帮助机器人导航?
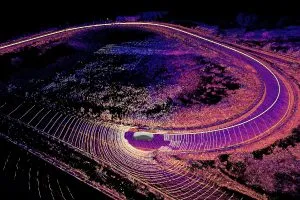
3D LiDAR SLAM(同时定位和映射)是一组算法,旨在通过将连续扫描相互匹配来计算传感器的位置。激光雷达 SLAM 算法的输出通常是轨迹,即传感器在每个时刻的 3D 位置和方向,以及源自每次扫描聚合的 3D 点云。由于它仅依赖于几何匹配,因此这些算法非常适用于计算机器人系统在 GPS 配置较差的情况下的位置和方向,例如室内场所(仓库、停车场等),或被高层建筑包围的区域,例如城市环境。
从理论上讲,LiDAR 可用于创建机器人应操作区域的 3D 地图,然后通过将机器人当前“看到”的内容与 3D 地图进行匹配,在该地图内重新定位机器人。最后,它允许您获得与 GPS 完全相同的数据(地图中的位置和方向),但更精确,每秒 20 次,并且适用于各种环境。
在实践中,这个问题很棘手:实施工业级 SLAM 和重新定位需要创新,以适应机器人制造商的 LiDAR 配置,在机器人的特定运动中表现良好,并在没有其他子系统的地方成为可靠的定位源有帮助。这正是 Exwayz SLAM 介入的地方。
关于法国Exwayz公司进入企业商铺
深信 3D LiDAR 潜力的 3D 视觉公司。
我们是 Exwayz,一家总部位于巴黎的科技公司,其使命是为您带来最好的实时 3D LiDAR 处理。我们授权创新企业构建他们的高级应用程序。我们的专家团队开发最先进的算法,让您专注于真正重要的事情:通过您的核心专业知识为您的客户带来附加值。
我们为学术和研究团队提供 Exwayz 工具和维护。
Exwayz SDK 对从事非营利项目的学生和研究人员免费且功能齐全。
