俄罗斯打造外骨骼“阿凡达”远程控制机器人
在俄罗斯,专为远程控制工业机器人而设计的 Avatar 系统的实验室测试已经开始。在 俄罗斯Innopolis 大学的基础上,在 NTI 能力中心进行“机器人和机电一体化组件技术”方向的测试。该系统的创建者使用了 安卓平台 开发的外骨骼的修改版本。外骨骼通过计算机连接到机械臂,开始充当工业机器人的遥控器。
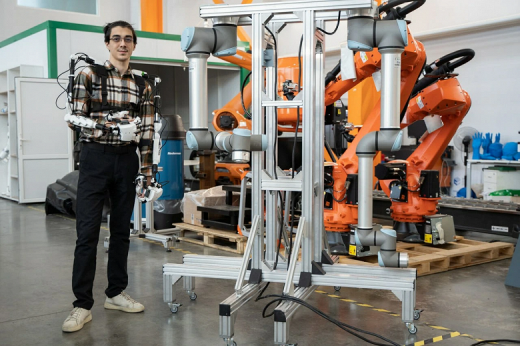
在此阶段,机械手可以使用外骨骼将各种物体移动到火柴盒大小。该系统具有扭矩反馈,也就是说,如果机器人与某个物体或另一个人发生碰撞,带有外骨骼的操作员会感觉到。
Ruslan Damindarov,是Innopolis 大学 NTI 能力中心的实验室助理。
目前,Avatar 和机器人之间的数据传输是通过 Wi-Fi 进行的,但未来将使用其他类型的通信,这样系统就可以在机器人与操作员之间的任何距离内工作。这将使人们能够在危险场所安全地操作机器人。
通常,工业机器人被编程为在工厂或工厂中执行重复性任务。我们的项目旨在解决无法对机器人进行编程的动态任务。例如,清除碎片或操纵放射性元素。
