如何选择工业机器人?具有不同类型机器人的特点和主要应用的实用指南
自1959年Devol和Engelberger开发的第一个模型--当时重达两吨多的解决方案,具有开拓性,但与最近的版本相比,速度慢、笨重且不准确--工业机器人已经经历了显著的发展,其领域也在迅速发展。
技术发展背后的驱动力是汽车行业,鉴于其流程的可重复性以及对质量和稳定的生产量不断增加的需求,汽车行业对机器人技术在工业中的普及起到了重要作用。今天,工业机器人是许多生产活动的一个组成部分,以至于它们被认为在不止一种应用中是不可或缺的。
工业机器人领域的快速发展导致了不同的类型和应用:不是所有的工业机器人都是一样的。虽然与其他类型的自动化相比,它们非常灵活,但每种类型都更适合于特定的任务,而不是其他。
那么,我们如何选择最合适的、符合我们需求的?在对全球机器人市场进行快速概述之后,我们将看到工业机器人是如何定义的,如何对其进行分类,以及它们能够做什么。
主题索引
(1)全球有350万台工业机器人在运行
(2)什么是工业机器人
(3)工业机器人:机器还是准机器?
(4)工业机器人有什么用?
(5)工业机器人的不同类型
(5.1)笛卡尔机器人
(5.2)关节机器人
(5.3)人形机器人
(5.4)拣选机器人机器人(Delta)
(5.5)协作机器人,最新的市场趋势
(5.56)全球有350万台工业机器人在运行
世界范围内机器人技术的增长是不可阻挡的。根据国际机器人联合会(IFR)在其报告《2022年机器人技术》中报告的数据,机器人年安装量在六年内几乎翻了一番,一年内新安装的机器人超过50万台(517,385),同比增长率为31%。2021年,全球工厂中运行的机器人数量超过350万。
意大利仍然是世界第六大市场,欧洲第二大市场,仅次于德国,2021年有14,083辆,是该国历史上最成功的一年,增长了65%。
(2)什么是工业机器人
在最一般的定义中,工业机器人是一种铰接结构的形式,有各种配置。如果我们想更好地说明 "工业机器人 "的含义,我们可以使用ISO TR/8373-2.3中给出的定义--在许多其他定义中,最普遍接受的定义--根据该定义,它是 "具有多个自由度、自动控制、可重复编程、多用途的操纵器,可以固定在原地或移动,用于工业自动化应用。
这些结构是通过连接一系列的旋转和/或线性运动学或关节来实现的。每个关节都提供一种运动,共同使机器人结构或机器人手臂被定位在一个特定的位置。
为了将安装在机器人末端的工具定位在空间的任何一点和任何角度,需要六个关节或六个自由度,通常称为六轴。
工作区域是机器人操作的体积,由机器人手臂的结构、每个手臂元件的长度以及每个关节的运动类型和运动范围来定义。
因此,在工业方面,这些是多功能工具,基于配备有传感器和软件的机械系统的相互连接,其设计考虑到了特定的目的,可以进行潜在的无限范围的操作,包括固定的和移动的,比人类操作更精确和快速。

(3)工业机器人:机器还是准机器?
在通常的想象中,机器人被认定为是代替人类执行任务的机器。它也可以被定义为一个同时具有软件组件的硬件机器。但为了理解 "机器 "一词是否被误用在机器人身上,首先有必要澄清什么是 "机器",什么被认为是 "准机器"。
简而言之,机械指令2006/42/EC对 "机械 "一词的定义是:零件和/或部件的组合,其中至少有一个是可移动的,配备了除人或动物直接努力以外的驱动系统,即有自己的动力,能够独立操作,例如在举重和运输材料时,符合机械指令附件1的安全要求,并带有CE标志。
另一方面,同一指令将 "部分完成的机械 "定义为零件和/或组件的组装,其本身不能执行任何特定的功能,为了执行这些功能,必须与其他机械或部分完成的机械结合或组装。
因此,是否需要与其他机器或部分完成的机器进行组装以实现其功能,是决定一台机器是否能独立运作的判别因素。
回到工业机器人,作为机器或准机器的分类取决于机器人的含义,最重要的是,它执行什么功能。
事实上,如果机械手或机器人能够独立完成规定的功能--例如,在制造汽车的装配线上进行焊接操作--并且其安装被简化为将其固定在最终位置的操作,那么它必须被视为所有意图和目的的 "机器",因为它符合指令的所有要求,包括符合性声明、CE标志、使用手册和技术文件。
相反,如果机械手或机器人能够 "在交付条件下发挥作用",但孤立地看不能有一个确定的功能,如机械手机器人的手臂在空间的运动,因此打算与其他机械 "整合",它必须被视为机械指令2006/42/EC第2(1)(g)条意义上的 "部分完成机械"。在这种情况下,机械手或机器人必须附有指令附件二B点规定的声明,该声明必须由制造商提供,即组装由机器人和集成机器组成的复杂组件的人。
因此,尽管机器和部分完成的机器受制于相同的指令和技术标准,但制造商需要履行的一些义务会根据它们是一种还是另一种而改变。
事实上,对于机械来说,必须执行CE标志认证程序,而对于部分完成的机械来说,必须分析相关的和适用的基本安全要求,并且必须提供不同的和具体的文件。

(4)工业机器人有什么用?
美国机器人研究所将机器人定义为“一种多功能、可重新编程的机械结构,旨在以编程的可变运动方式移动材料、零件、工具或专用设备,以执行各种不同的任务。”在许多方面,该定义与上一段中提到的 ISO 标准的定义很接近,但它使我们能够了解在大多数情况下,机器人在工业领域的设计用途以及它是什么用于...
基本上,机器人能够保证更高的节奏和对产品质量的更多关注,举起更重的重量并以极高的可重复性移动物体,与人类同行执行的性能较低的活动相比,机器人可以确保更高的产量和更连贯的流程。
以此为基础,机器人可以插入到刚性和柔性生产系统中,前者的特点是一系列相同且重复的操作,其目的是优化生产率和过程可重复性,而后者则具有高度可变性和定制性,以响应不断变化的市场需求。
(5)不同类型的工业机器人
由于工业机器人可以执行的功能很多,因此首先根据主要类型对其进行区分和分类是有用的。
有两个基本类别允许第一个细分:运动学,即它们能够执行和确保的运动和自由度(DoF,自由度),以及轴的数量。更准确地说,运动学是指存在于各种轴之间的机械链接链以及轴的类型,旋转或线性。
(5.4)拣选机器人机器人(Delta)
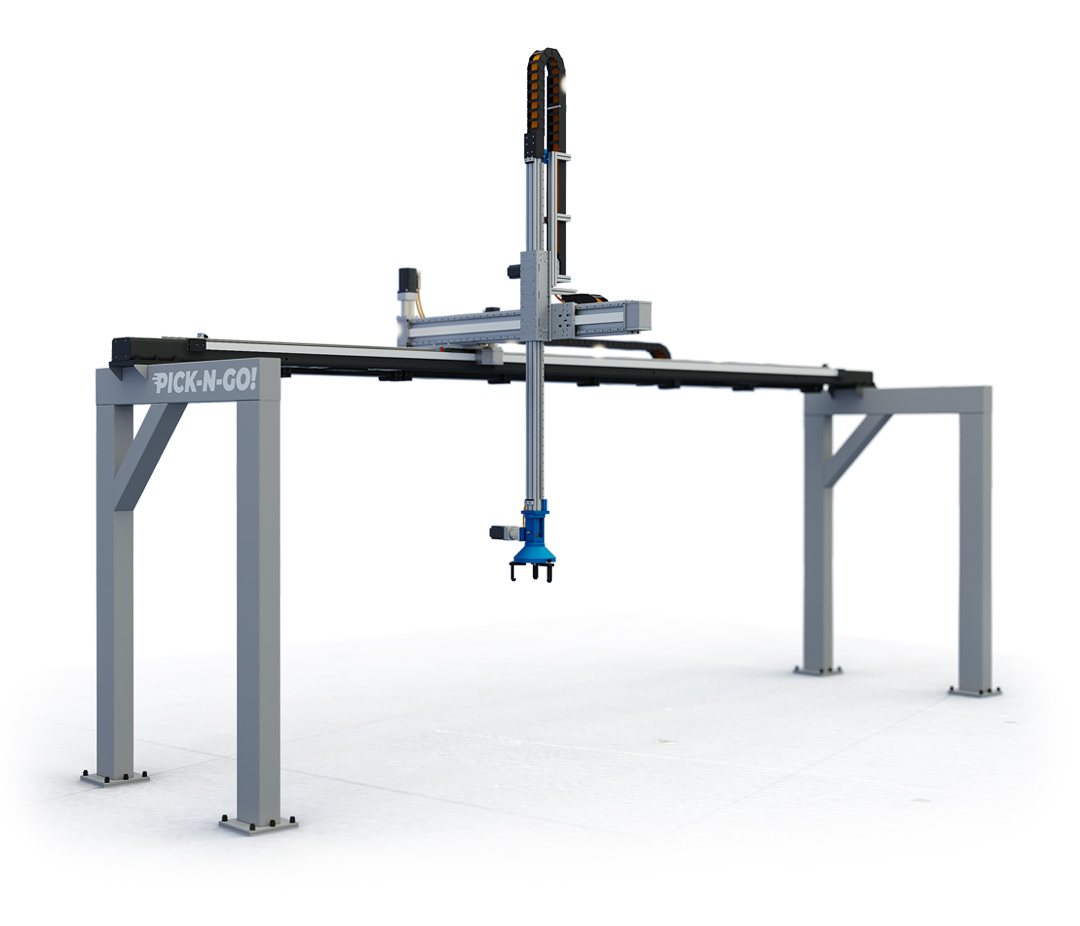
笛卡尔机器人(ICS = IntegratedCombination System)的特点是运动学最简单,因为它们由机器人移动的线性轴和旋转轴的组合组成;每个都对应一个自由度。它们也被称为线性机器人、龙门机器人或 XYZ 机器人,因为它们通常在参考笛卡尔坐标系(X、Y 和 Z)的 3 个轴上直线移动,可以添加手腕以允许旋转运动。
如果说轴数,这类机器人的特点一般是2轴、3轴或者最多4轴,但直角坐标机器人的轴数可能更高。
它们首先是为搬运和加工应用而设计和开发的,并且非常受欢迎,因为它们提供了非常容易的编程和配置灵活性,以及调整速度的能力,工作空间内的精度,行程长度和机器人的尺寸,由于它们的模块化。
就应用而言,它们用于需要精确定位的装配操作、机加工件的装载和卸载以及工具更换(机床管理)和取放。
凭借 X、Y 轴上的大行程能力和沿 Z 轴的垂直偏移,笛卡尔机器人还可以有利地用于在现有生产线上搬运或码垛物体,或用于运输升高的负载,因此的典型应用-称为拟人化机器人。
这是因为,在重量相同的情况下,产生的力矩更少,笛卡尔机器人设法将负载保持在 Z 轴下方的中心;因此,就拟人机器人的关节而言,保证了更高的稳定性和更高的动态性以达到空间中的相同点。
直角坐标机器人市场主要涉及汽车、电子电气、化工石化、食品饮料等行业。
根据 Research & Markets,笛卡尔机器人的顶级供应商包括 ABB、博世力士乐、Brooks Automation、Denso、Gudel Group、Hirata、Iai America、Koganei、Midea Group、Nidec、Omron、Parker Hannifin、Samick Thk、Seiko Epson、Sepro Robotique、 Ston Robot、Tm Robotics、Yamaha Motor、Yaskawa Electric、Shibaura Machine、Mks、Kuka、Fanuc、Comau 和 Yushin Precision Equipment。
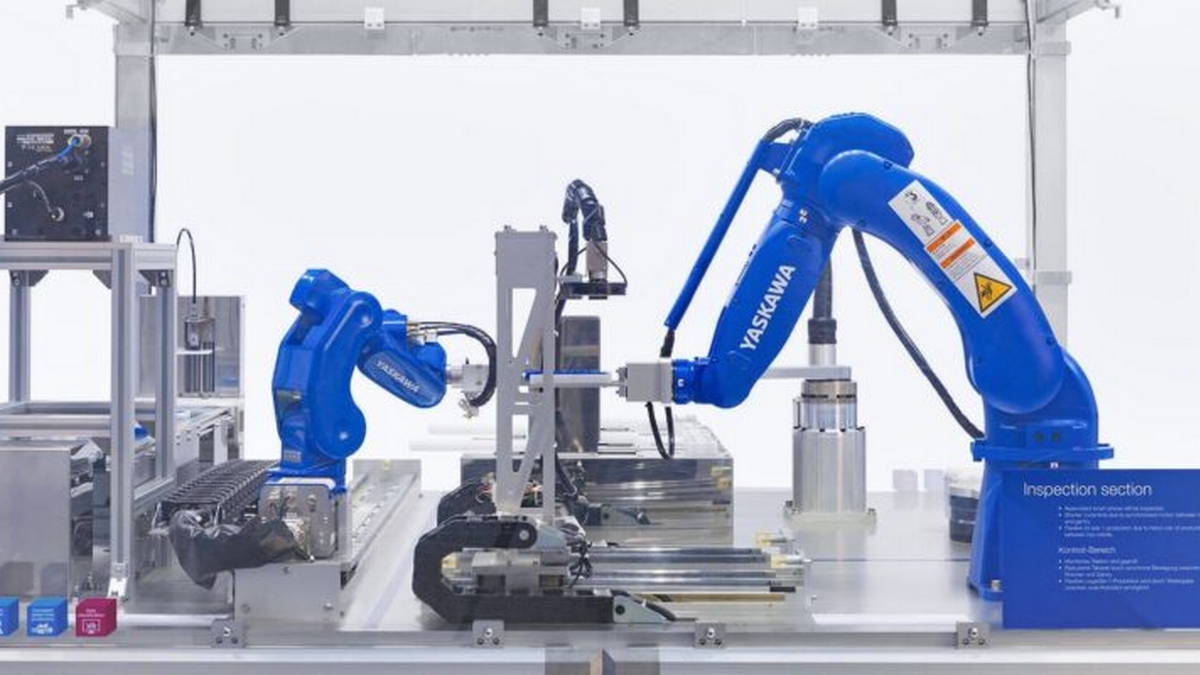
关节机器人
SCARA机器人——选择性顺应装配机器人手臂或选择性顺应铰接机器人手臂的首字母缩写词——由4 个轴 (4 DoF)制成并沿固定的垂直轴移动,在同一平面上执行旋转。
它们允许将对象定位在添加了旋转的 X、Y、Z 体积中。实际上,2 个铰接臂在水平面上移动,一端铰接固定的垂直轴,而另一自由端有一个 Z 轴,允许相对于该轴垂直移动和旋转。由于垂直运动沿单个轴发生,因此结构更简单,因此比铰接模型更可靠且成本更低。也有仅由 3 个 X、Y、Z 轴制成的 SCARA。
与笛卡尔机器人相比,它们是速度非常快且用途广泛的机器人,后者在横向运动方面表现出色,并用于垂直装配,不需要处理工件的定位技能,也可用于拾取和放置以及雕刻。
根据Markets and Markets的数据,根据 SCARA,市场上最重要的公司是精工爱普生、雅马哈汽车、安川电机、电装、史陶比尔、三菱电机、川崎重工、ABB、东芝机械、柯马、Nachi-Fujikoshi、Kuka、 Fanuc、Omron Adept、Durr、Hiwin Technologies、Janome、Hirata、Delta Electronics、Fisnar、Gridbots、Japan Unix 和 Innovative Robotics,而 Adtech 和 Googoltech 是该领域的新兴公司。
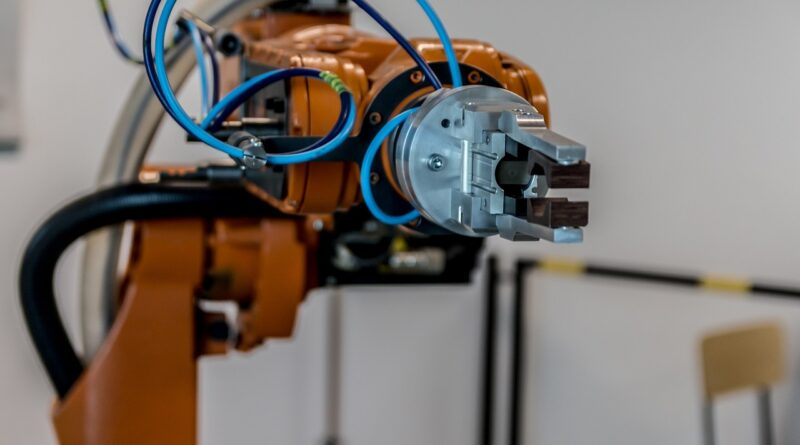
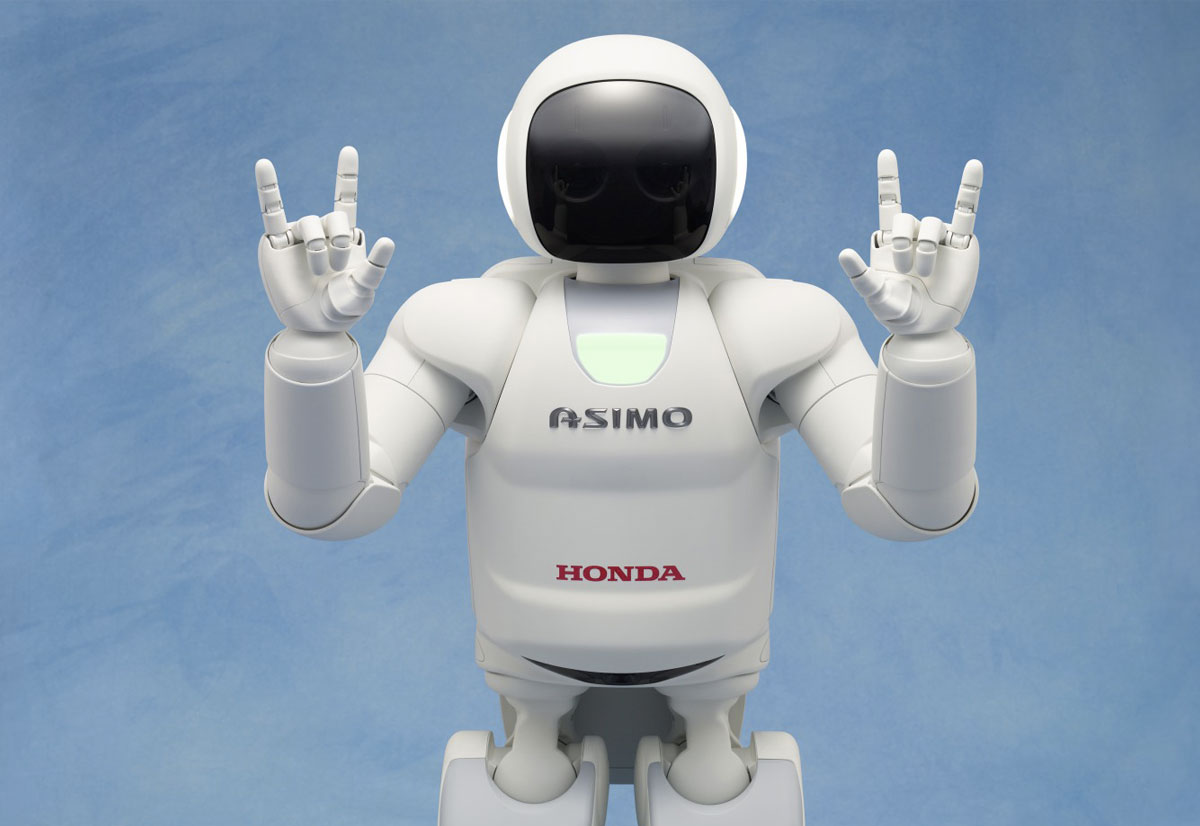
类人机器人
类人化或铰接式机器人之所以被称为是因为它们是模仿人类手臂和手的运动能力而制造的。它们具有非常灵活的结构,因为它们由一系列关节组成,关节数量从 4 个到 7 个不等,每个关节对应一个自由度 (DoF),并且允许机器人到达其范围内的任何位置和方向工作量。
它们通常具有6 个轴的特征,即 6 自由度,因此它们可以沿 X、Y 和 Z 轴执行复杂且高度可变的运动。通过添加一个额外的轴,可以是线性的或旋转的,具有运动学冗余的机器人是获得,即 7 DoF 工业机械手,其轴数超过给定任务所需的轴数。一种消除机器人奇点并赋予系统更大刚度和更好负载分布的配置。
这些机器人广泛应用于汽车行业,用于零件的组装、装配和焊接、物料搬运、机器装卸和包装。
根据Markets 和 Markets,在市场上运营的主要参与者是 Abb、Fanuc、Kuka、Yaskawa Electric、Kawasaki Heavy Industries、Omron Adept Technology、Nachi-Fujikoshi、American Robot Corporation、Seiko Epson、Denso 和 Aurotek Corporation。
协作机器人(cobots)的子类别也属于拟人机器人的范畴,即使运动学顺序不同于经典和传统的6轴拟人机器人,以及所谓的码垛机器人,用于末端在线应用程序。通常这些机器人有 4 或 5 个轴(X、Y、Z + 1/2 旋转)并且机器人法兰与地板平行。
拣选机器人
Picker 或 Delta 机器人(或蜘蛛机器人)也称为并联机器人,因为它们具有并联运动学结构,因此它们能够执行比 6 DoF 机械手更复杂的自动化应用。它们由三个手臂组成,这些手臂通过关节连接到工作区域上方的单个底座,在该底座内,相同的手臂快速准确地移动单个工具,直接控制其每个关节。
它们通常用于食品、制药和电子行业的取放和包装应用。Delta 机器人可以有 3、4 或 6 个轴。
根据Transparency Market Research,该市场最具代表性的制造商有 Fanuc、Yaskawa Electric、ABB、Nachi-Fujikoshi、Denso、Mitsubishi Robotics、Epson Robots、St?ubli、B+M Surface Systems GmbH、Omron Adept Technologies、Kuka、Kawasaki , Comau Robotics, Universal Robots, Wittmann Battenfeld Group, Siasun Robot and Automation, Rethink Robotics, Delta Electronics, Hiwin Technologies, Seiko Epson, Midea Group, igus GmbH, ONExia, Panasonic, Robert Bosch GmbH 和 Schunk。
协作机器人,市场最新趋势
协作机器人,更广为人知的名称是cobots(协作机器人),构成了机器人技术发展的顶峰。它们是为满足与人类安全共享工作空间的需要而诞生的机器人,具有高度灵活性的特点。通常比拟人化更容易编程,它们共享 6 个或更多的自由度,类似于人臂的关节形状,并且可以将各种工具集成在手腕上,以实现最多样化操作的自动化,它们的特点是通过流线型、绝对轻巧和紧凑的运动学,使他们能够在开放空间中工作并与周围的环境互动。
第一个协作机器人模型由 Universal Robots 于 2008 年开发。
协作机器人是一个不断增长的市场。根据 ReportLinker 的全球协作机器人市场规模、份额和行业趋势分析研究数据,到2028 年,全球协作机器人市场规模预计将达到 108 亿美元,年增长率为 40.1%。
根据Grandview 研究,我们发现全球协作机器人市场的领先企业包括 ABB、Denso Robotics、Epson Robots、Energid Technologies、F&P Robotics、Fanuc、Kuka、Mrk-Systeme Gmbh、Precise Automation、Rethink Robotics、Robert Bosch、 Universal Robots、Yaskawa Electric、Mabi Robotic、Techman Robot、Franks Emika、Aubo Robotics、Comau 和 Onrobot。
移动机器人:AGV和AMR
到目前为止我们谈到的机器人都属于固定或静止机械手的类型。除了它们,在一般分类中,我们还可以考虑移动的,即能够在轨道或轮子上自由移动。
在第一种情况下,最常见的例子是AGV(自动导引车),自动导引车,主要用于物流领域,用于将物品从仓库运输和处理到生产线或通过无线通信直接在生产线上装载托盘。
为了移动,他们遵循放置在人行道上的“标记”、指南或“彩色带”,或使用激光和遮阳板(激光制导车辆)。根据所使用的技术,它们可以具有或多或少的高度自动化。
自主移动机器人(AMR 或自主移动机器人)比AGV 更新和先进,能够在没有人工干预的情况下移动和导航。与 AGV 不同,AGV 必须遵循固定路径并且如果路径中存在障碍物则被迫停止,而 AMR 借助传感器和软件能够绕过它们,并通过识别周围环境来遵循预定的路线。
新一代移动机器人的代表是步行机器人,它们配备有腿和脚,即使在困难的地形和表面上也可以移动,模仿人类或动物的行走。步行机器人是一个非常当前且仍在实验的研究领域,尤其是在微观尺度上,正在研究微型机器人用于修理或组装工业中的小型结构或机器,以及作为医疗领域的手术助手,受雇于微创和创新程序。
