既会跑又会游!哈工程“水陆两栖机器人”荣登国际顶级期刊
科技日报记者 李丽云 通讯员 朱虹
这款水陆两栖机器人在颗粒介质地面能够达到4倍体长/秒的奔跑速度,达到同类型机器人的领先水平,实现了从问题提出、理论突破到技术成果落地的跨越。
该论文由哈尔滨工程大学水下机器人技术国家级重点实验室独立完成,王刚副教授为论文的通讯作者,哈尔滨工程大学博士研究生马鑫盟和刘开鑫为共同第一作者。

提出新思路,系统化繁为简
两栖机器人的研究一直是机器人领域的热点之一,为了在海陆两种不同的介质中运动,大部分两栖机器人既有轮子又有螺旋桨,但由于环境介质密度相差巨大,尤其在连接海洋和陆地的浅滩,浪流扰动剧烈,地面干湿颗粒力学特性存在很大不同,这样的构型不利于机器人敏捷运动。
王刚团队提出了一种足桨式多模态水陆两栖机器人方案,为两栖机器人方案设计提供了一种新思路。通过推进装置的独特构型和参数优化方法,将足桨自身的多模式推进能力与机体的变型能力相结合,实现了机器人在两栖环境下的运动模态切换,降低了机器人系统的复杂程度,同时满足水中、陆上两种完全不同环境下对于敏捷运动的需求,解决了传统方法将爬游功能叠加造成的运动性能不敏捷、作业效率低的难题。

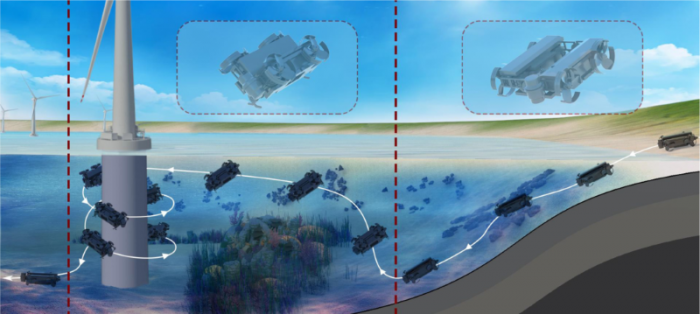
机器人的主要组成部分及运动模态切换方式介绍
机器人由可变形机体框架、变型驱动关节、控制舱、电池仓、足桨驱动装置组成。在奔跑模式下,机体在变型驱动关节的驱动下展平,足桨驱动关节以低速模式驱动足桨,机器人依靠足部的推进能力在海底或沙滩奔跑;在游动模式下,机体在变型驱动关节的驱动下折叠,足桨驱动关节以高速模式驱动足桨,机器人依靠桨的推进能力在水面、水中游动。首次实现机器人在水面、水中、水下游动,并能在沙滩快速奔跑。
奔跑速度优秀,各种环境所向披靡
做真科研,让科研成果落地是团队奋斗的目标,团队研发的机器人并非实验室的模型,无论是石地、草地、沙滩,还是水底、水中、水面,机器人都表现出了比同类机器人更优越的运动能力和负载能力,“体能测试”十分优异。
足桨式多模态水陆两栖机器人凭借独特的构型,水下陆上均能实现高速运动。团队通过弹性刚体-颗粒介质-两相流体耦合仿真方法,对机器人的足部几何参数和奔跑过程的运动参数进行优化,极大地提高了其在沙滩和海底的运动能力。
采用多传感器感知和信息融合技术,机器人可自动识别当前的环境并调整运动模式。与同类机器人相比,在已公开发表的研究成果中,该机器人在颗粒介质地面奔跑速度可达到4倍体长/秒,是目前同类型机器人中运动速度最快的。

大部分两栖机器人下水后悬浮于水中,而该机器人入水后处于负浮力状态,可直接沉入海底,这为机器人在海底工作提供了优越条件。
在海底时,机器人遇到大面积水草、珊瑚礁,直接穿过必然会造成一定生态破坏,此时机器人由爬行状态切换为游动状态,身体折叠同时足桨驱动关节切换为高速转动模式,形似空中的四旋翼构型,针对这个构型团队开发的控制算法让机器人实现了水中多自由度运动。
机器人自身高度仅为0.22米,当小巧玲珑的它紧贴海底时,比悬浮式机器人受水流影响更小,作业更稳定,当切换为游动模态时,在水中能够敏捷地在各类障碍物中穿梭。

此外,借助游动模式,机器人可在运动水面附近接收定位与通讯信号,对自己的位置信息进行校准,这对于两栖机器人来讲是十分必要的能力,因为在浅水环境中的定位和通讯都是行业难题。
研发团队平均年龄26岁
这支机器人研发团队十分年轻,除了王刚副教授,还有3名博士生和5名硕士生,团队成员平均年龄只有26岁。

王刚表示,研究成果能够在行业顶级期刊发表,代表了团队的研究方向、制定研究思路、机器人的研制和试验结果等方面获得了业内认可。更有意义的是,见证了参与研究的每位研究生同学的成长。
想要完成一个具有优异性能的机器人,需要团队在系统集成、智能控制、环境感知等方面都不能有短板,在两栖机器人研发过程中,在机器人的重量与负载能力、陆上与水下介质受力差异、快速性与操纵性等各种关系中寻找平衡点是研发过程中的最大瓶颈。
团队在研究过程中发现,从陆到水整个过程中的颗粒介质力学特性不同,而现有理论都是以干颗粒为研究对象,湿颗粒研究成果寥寥无几。没有可以参考的研究成果,团队便从最基础的机器人足部与颗粒介质交互过程的力学性质入手,这是一个漫长的过程,历时两年才初见成果。通过建立机器人在沙滩和海底奔跑过程的动态阻力模型,实现了对机器人在颗粒介质地面奔跑过程的预测和参数优化;借助计算流体力学、离散元和多体动力学耦合仿真等方法,完成了机器人的设计和优化过程。虽然从头开始的过程将研究周期拉长,但在这个过程中,同学们迅速成长起来。如今,这个仅有9人的团队,从设计到装配,从接线到调试,从编程到试验的各个流程都有“专家”。
团队成员马鑫盟说:“王刚老师一直要求我们要从实际需求出发做科研,注重基础理论研究,做好基础理论与实际应用的结合,产出有实际意义的科研成果。”
王刚表示,该成果是对团队过去探索过程的一次回顾,希望通过这篇论文起到一定的示范作用,在应用实践中找到真问题,静下心来脚踏实地解决它,一定会有好的结果产出。未来团队将针对机器人在两栖环境运动过程中的基础力学理论继续深入研究,为提高机器人的智能化水平不懈努力。
该团队所依托的哈尔滨工程大学水下机器人技术国家级重点实验室,成立于2002年,奠基人为中国工程院院士徐玉如教授。实验室以水下机器人、水面无人艇等海洋无人系统为研究对象,先后获得国家科学技术奖4项,省部级科学技术奖30余项,是国家级科技创新团队。实验室固定人员80余人,拥有国家级领军人才、拔尖人才等一批中青年学术带头人。在读硕博研究生300余人。实验室依托的船舶与海洋工程学科,是国家"双一流"建设学科,教育部评估A+学科,是我国船海领域的科学研究和人才培养基地。以实验室成立国内第一个“海洋机器人”专业,负责该专业本硕博贯通高层次人才培养,是全国教育系统先进集体。
(哈工程供图)
