工业自动化2.0演进:具有自我意识的运动控制
工业自动化领域的下一个发展方向要求机器能够独立调整其性能参数,以完成工厂操作人员分配的任务,或根据生产力增强的人工智能(AI)算法的输入,对机器自身重新配置以优化其行为。具有自我意识的机器的价值在于,它能够最大限度提高生产力,延长设备的运行寿命并减少维护成本。
具有自我意识的运动控制之旅
自我意识,是指系统基于对其能力和系统性能目标的了解,对系统自身的自我认知。事实上,具有自我意识的运动控制系统需要实施多个控制环路,以解译传感器输入和预期系统参数,并允许比较系统自己的操作行为与预期系统性能。为了实现这些目标并创建具有自我意识的运动控制系统,需要创建自适应运动控制代理,以监控系统操作,并根据驱动系统的工作环境动态调整其性能。在ADI看来,通过使用自动代理来检测和监控持续变化的工作环境条件,能构建实现具有自我意识的运动控制系统。这些条件衍生自一系列嵌套闭环实时性能模型,而这些模型均采用现场级别驱动器的运动参数。在推导出驱动系统的电气和机械模型后,可利用该模型比较和调整在自动化系统金字塔的监督、规划或管理级别请求的预期系统性能(如图1)。从高于自动化系统金字塔监督部分的任何级别请求新的预期系统性能时,需要将一组新的控制参数传输到运动控制系统的自适应控制部分。然后,系统通过调整其性能以匹配新的性能请求来做出响应。
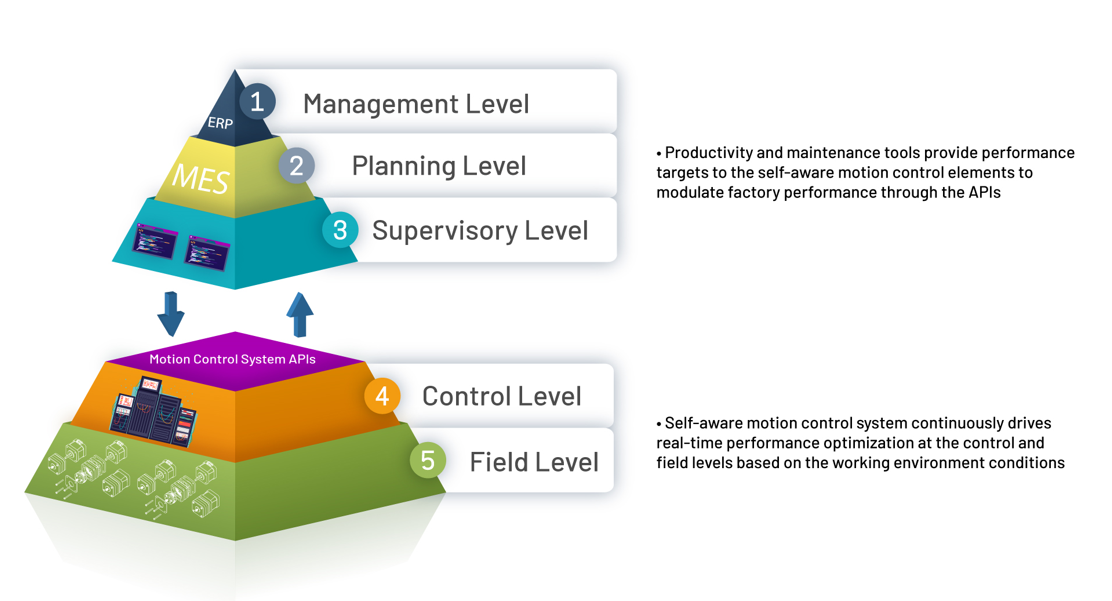
图1.自动化系统金字塔
实现具有自我意识的运动控制系统的两大优势分别是能够自我调节,以及实时自动最大限度提高运动控制系统的性能。这项新功能为自动化系统金字塔的监督、规划和管理级别提供了机会,允许通过实施生产力增强来调整具有自我意识的运动控制系统。此外,支持人工智能的软件算法可用于调整系统性能,从而在工厂范围实现更好的结果。为了更加直观,ADI设计了一张具有自我意识的运动控制概念图,以便更好了解实施具有自我意识的运动控制系统所需的4个基本要素。
具有自我意识的运动控制概念图:为了实现这一级别的具有自我意识的运动控制,需要开发控制系统图。如图2表示成功实施具有自我意识的运动控制所需的4个关键要素。
- 要素I:目标或任务:需要为系统建立明确的目标或任务。在示例中,这表示“以最佳方式将啤酒杯从A点移动到B点,且不洒出任何啤酒”。
- 要素II:预期系统行为:明确该目标后,具有自我意识的运动控制图的下一级别发起预期的运动行为。在啤酒杯例子中,这将是“使用线性运动来移动啤酒杯,同时自动调整其运动,从而在所需的机械系统控制安全限制内补偿不同的啤酒杯重量和尺寸”。
确定了目标和预期系统行为后,自适应控制引擎通过自动调整运动控制驱动及其集成的机械系统,以便在独特的工作环境中运行时实现峰值工作性能,从而在核心驱动系统运动学及其伴随机械系统之间实现动态驱动融合。

图2.具有自我意识的运动控制概念图
- 要素III:核心驱动系统:具有自我意识的运动控制系统的核心是其运动学。挑战在于观察、学习和监控电机与驱动系统的性能水平。要创建有效的驱动系统模型,需要实施智能观察器,以便获得对其运动参数及其物理限制的基本理解。要想实现这一目标,可使用磁场定向控制器(FOC)与专用的位置传感器或无传感器FOC方法,以了解电机在操作环境中如何受力,如何做出反应。通过监控和自动调整来自电机扭矩-磁通电流环路、速度环路及其定位环路的控制参数值,可以进一步优化驱动系统响应。收集这些信息的数据报文并将其馈入智能观察器后,实施优化算法以确保计算运动控制参数,并确保基础运动控制算法收敛以形成一组最优运动参数(如图3)。现在,创建了间接运动模型以对驱动系统的运动进行建模和优化后,可以通过引入自适应控制引擎,实施下一级别的具有自我意识的运动控制解决方案。 目前,Trinamic(现已成为ADI公司的一部分)所推出的TMCL- IDE自动调整运动控制工具,即可对运动控制值实现优化。
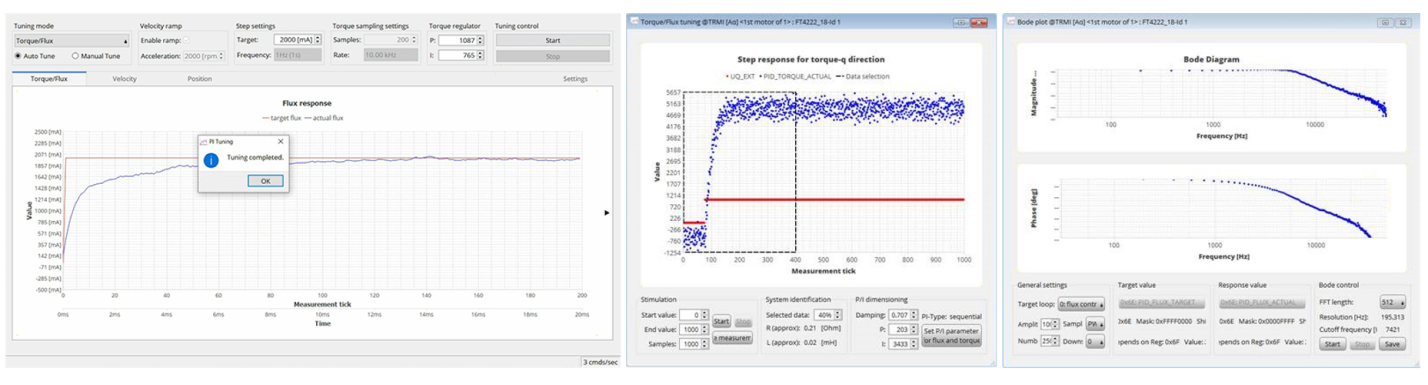
图3.监控和自动调整扭矩-磁通电流、速度与位置环路
- 要素IV:自适应控制:在系统的运动学和FOC自动调整功能的基础之上,现在可以专注于实施具有自我意识的运动控制的下一级别——自适应控制引擎。这一级别的智能运动侧重于向自适应控制引擎传达预期系统行为(如图4)。该系统行为由生产员工、工厂主管提供,或者根据在智能传感器网络中收集工厂数据的人工智能生产力算法生成。将预期行为传递至自适应控制引擎后,具有自我意识的运动控制系统开始动态重新配置驱动系统操作参数,以匹配预期系统行为。这些预期行为的一些示例包括,请求提高工厂吞吐量,或通过在安全模式下操作,延长电机的操作寿命。由于运动控制系统自动调整其运动控制参数来实现该全新的请求性能水平,自适应控制系统持续监控闭环系统以维持其预期的性能水平。即使驱动系统因机械系统磨损而遇到变更,或者即使电机工作环境变化,也会维持该状态。现在,系统已达到具有自我意识的运动控制的最终级别。
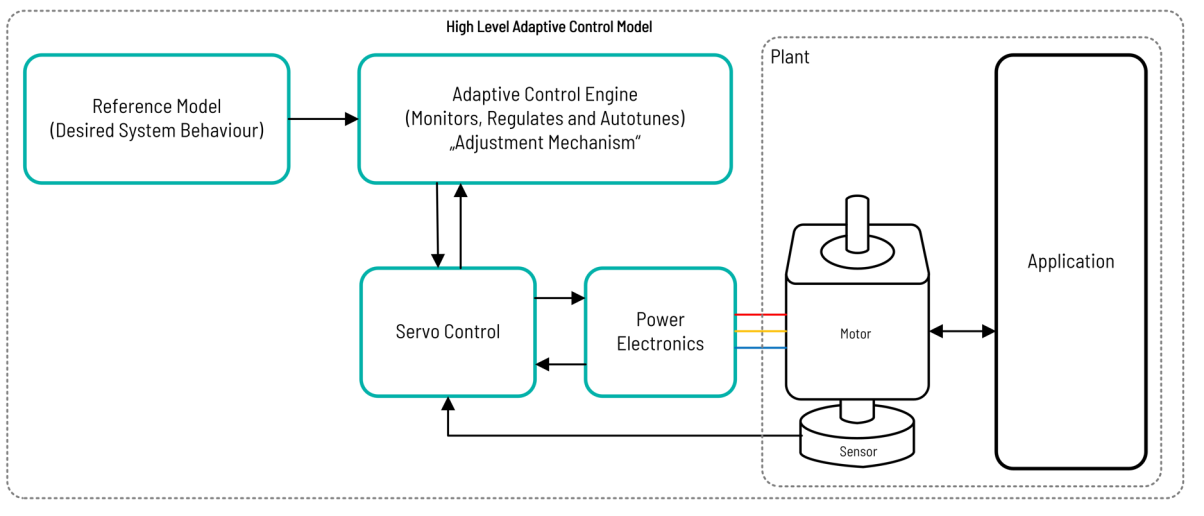
图4.自适应控制模型
使用真实示例也许是演示此概念的最佳方式(如图5)。比如调酒师想将一杯满满的啤酒从吧台一侧准确地传送到顾客面前,过程中却不洒出一滴啤酒,该如何实现?如果使用了具有自我意识的运动控制系统,就会变得非常简单。该任务的目标是在尽可能快的时间内将啤酒从调酒师(A点)送给吧台边坐着的顾客(B点),并且不洒出啤酒。此示例中的传送系统是一个带有内置重量探测器的杯托,用于检测各种尺寸的啤酒杯的重量,并利用线性运动在吧台上移动啤酒杯。试想一下,利用具有自我意识的运动控制系统,可以在尽可能快的时间内将啤酒送给顾客,如果顾客将空的或半空的啤酒杯放回杯托,便于传回调酒师续杯或丢弃,而此系统还会自动调整其速度和性能。此外,如果调酒师使用不同尺寸的玻璃杯盛装其他类型的饮品提供给顾客,该系统同样可优化效率。
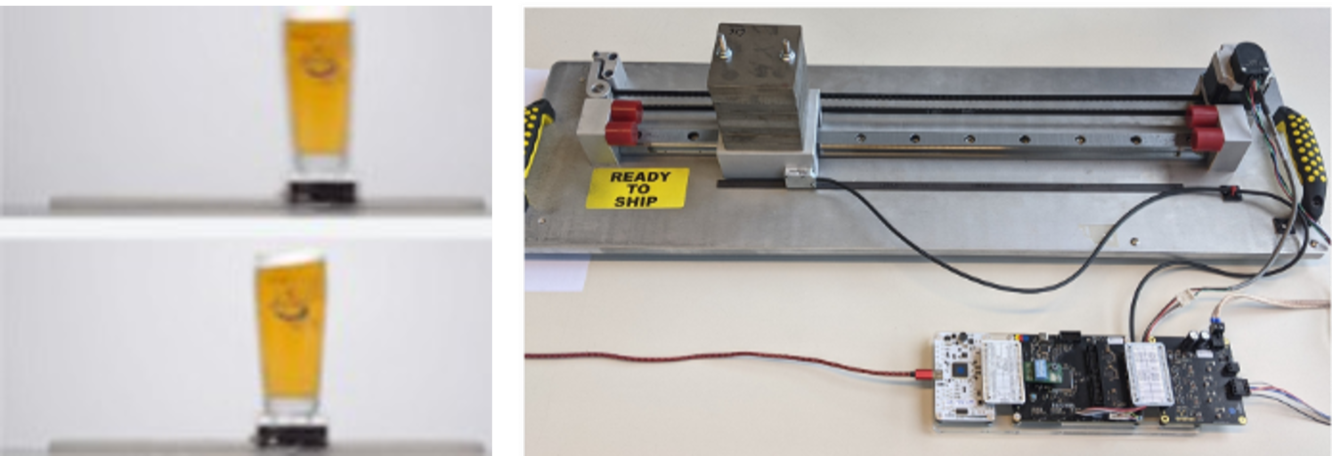
图5.具有自我意识的运动控制系统的实际应用示例(不同的负载质量)
虽然听起来有点不可思议,但具有自我意识的运动控制技术如今正在飞速演进,相信不久的将来便会步入人们的生活和工作中。试想一下,当整个工厂中的设备都用上具有自我意识的电机和智能传感器之时,智慧工厂将远远超出人们的想象。届时,工厂车间设备的潜在故障能够自我修复,设备操作寿命被有效延长,生产流程可自动调节,生产力获得最大限度提高。欢迎来到激动人心的新世界,快来真切体验ADI具有自我意识的运动控制和下一次工业革命到来吧。
