机器狗一小时就能学会走路?模仿动物本能,研究已登Nature子刊
编译 | 夏舍予
编辑 | 徐珊
阐明该技术的论文《Learning Plastic Matching of Robot Dynamics in Closed-loop Central Pattern Generators》(在闭环中央模式生成器中学习机器人动力学的塑料匹配)已于7月18日在《自然·机器智能》杂志上发表,该论文的第一作者是菲利克斯·鲁珀特(Felix Ruppert)。
鲁珀特说:“我们研究的机器狗Morti具有跟动物相同的反射能力,可以自主从失败中学习如何走路。”
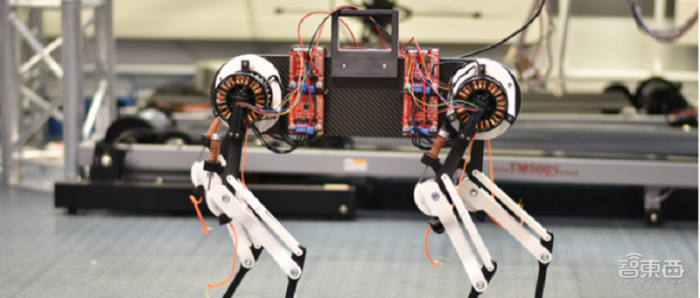
▲机器狗Morti
一、摔倒后再爬起,Morti可模仿动物学习
人类和动物的脊髓中都有一个叫做CPG(中枢模式发生器)的神经元网络。CPG可以帮助生物完成节律性的任务,如走路、眨眼或消化等。这种神经元网络不需要大脑输入信号,就可以产生周期性的肌肉收缩。
鲁珀特在Morti的背部安装了一个虚拟脊髓来模拟CPG的作用,并在这个虚拟脊髓中安装了样本数据库。Morti平稳行走时,机器人脚上的传感器数据会不断与CPG样本库中的数据进行比较,以提供合适的走路姿势。
如果机器人摔倒了,学习算法会通过改变腿来回摆动的距离和速度来优化行走方式。在机器学习的过程中,CPG会发送一些自适应的运动信号,来让机器人行走得更平稳。该机器学习过程的核心就是要改变CPG的输出信号,并监测机器在什么情况下会遇到磕绊。
▲Morti根据反馈数据优化行走
Morti模仿了小动物学习走路的过程,它们都是在不断跌倒后,才能找到最有效的肌肉使用方式,学会行走。鲁珀特说,一开始,Morti会摔倒,但大约一个小时后,算法就会帮Morti找到最好的行走方式。鲁珀特还说:“目前我的团队正在为Morti增加更多的传感器,扩大Mortimer的运动范围。我们想让Morti更像动物。”
二、高效节能,Morti行走一小时后能耗减少42%
行走同样的距离,目前大多数工业四足机器人需要几十上百瓦的电量,Morti却只需消耗5瓦电量。
这一方面是因为工业四足机器人有更大的体积和重量,需要更多的电量支撑行动,另一方面是因为Morti的算法更加智能。
一般的机器人行走时,机器学习会通过大量计算,预先设计每条腿运动的细节,这会消耗大量的电量。但是Morti在走路跌倒后,可以根据新的算法结果,重新调整走路的角度。Morti通过这些反馈数据来学习行走方式,不需要进行大量计算。Morti可以在学习走路的过程中降低能量消耗。研究发现,在Morti行走一个小时后,它消耗的能量比刚开始走路时减少了42%。
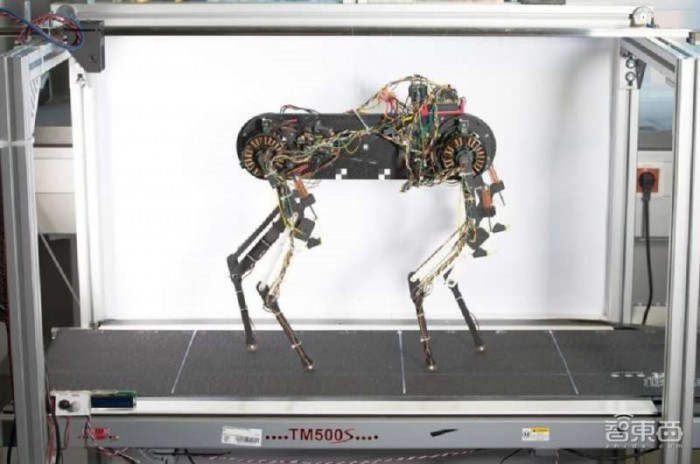
▲Morti在跑步机上行走
德克萨斯大学圣安东尼奥分校的教授迪瑞莎·库迪蒂普迪(Dhireesha Kudithipudi)表示:“通常而言,人工智能可以很好地学习一项特定任务,但人工智能无法在环境变化时进行重新校准。而Morti可以根据数据反馈自主调整自己的运动模式,它在重新校准环境方面可能会表现得更好。”
结语:结合人工智能与生物领域,探索机器人的更多可能
鲁珀特的机器狗可以通过人工智能算法,像生物一样进行自主学习。这不仅结合了机器学习技术,也涉及到了生物领域。
如果这种技术可以大规模使用,将会有两个好处:第一,机器学习会更加节能,消耗的能量更少。机器不必再根据大量的数据进行暴力计算,而是可以通过自主学习变得更加“聪明”。第二,这种技术可以为人工智能领域和生物领域的结合带来启发。
目前,这种技术可以让机器狗变得更像动物。未来,随着这种技术的发展,机器人可能会变得更像人类。
来源:Tech Xplore
