Mobileye最后的反击:FMCW对战TOF,争夺激光雷达王者宝座
Mobileye最后的反击:FMCW对战TOF,争夺激光雷达王者宝座
说到激光雷达就一定会提到自动驾驶,而在如何实现自动驾驶的方法论上,不管马斯克如何安利纯视觉方案,也不管他如何贬低激光雷达,特斯拉的中国学生们却没有学美国老师的玩法,纷纷给电动车装上了激光雷达,走雷达+摄像头的混合感知路线。
在刚刚过去的广州车展上亮相了13款装有激光雷达的车型,长城旗下新能源电动车品牌沙龙机甲龙更是一口气装上了4颗,并且放出狠话“4颗以下,请别说话”。如此霸气的炫富,即使在概念频出的新能源电动车圈里也不多见。
那到底激光雷达给自动驾驶带来了什么好处,以至于这么多车企都要装?又为什么说Mobileye可能会是激光雷达行业的终极赢家呢?继续往下分解
祖师爷Velodyne:以机械式激光雷达开场
都知道Mobileye以单摄像头视觉方案崛起于ADAS,但摄像头在某些场景下存在很难克服的困难,比如夜晚光线太暗导致成像效果不理想、恶劣天气导致能见度太低等。最为致命的是在高速路上,高速行驶的车辆需要提前感知前方足够远距离内的道路状况,好提前做好预警准备。而摄像头能清晰识别的距离有限,一般不会超过70米,这个识别距离在高速路上明显不够。
于是,激光雷达登场了。激光的准直性不错,光线聚焦不容易发散,能将识别距离提高到150—200米。1个激光发生器称为1线,16线就需要16个激光发生器,在竖直方向上1条线对齐排列,然后360°转动。这种方案称之为机械式激光雷达,也是激光雷达鼻祖Velodyne选择的方案。
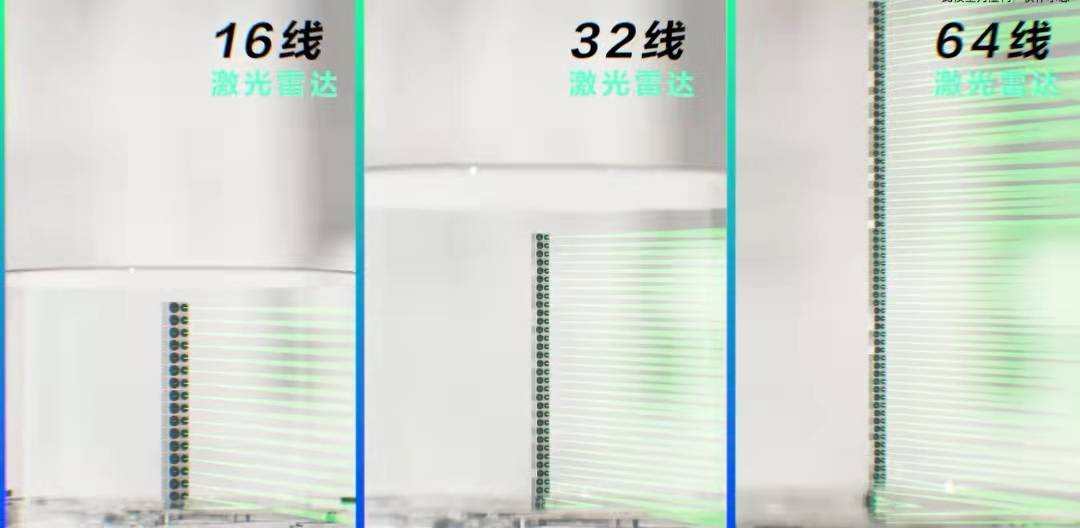
图:三种线数的机械式激光雷达示意图
优点是能探测车辆周围360°的图像,视场角FOV达到360°的最大值,没有视场盲区。但缺点也非常明显,要得到分辨率更高的图像,就要增加激光雷达的线数,也就是要增加激光发生器的个数,导致产品体积成倍增加,没法集成到车身里,只能装在车顶,被车厂亲切地称为“车顶肯德基桶”。

图:装在车顶的机械式激光雷达
更麻烦的是,要保证扫描光线彼此平行不交叉,需要调教激光发生器的相对位置。线数越多,需要调教的激光发生器数量就越多,调教难度又是成倍增长。另外,机械式激光雷达必须用电机作为转动部件。电机一刻不停的转动,就不断有机械磨损,导致工作寿命在几千小时,一般不会超过5千小时,离车规要求的上万小时距离较远。
体积大零部件多、制作难度大、使用时间短,种种原因导致机械式激光雷达的价格极高。2016年,Velodyne的16线产品售价约8000美元,而一枚64线产品售价高达8万美元,普通乘用车根本用不起。如今机械式激光雷达大都用在无人车的测试车上。
固态:用光学镜头偏转取代机械转动
既然激光雷达必不可少,机械式的缺点又这么多,那就用技术来升级它。聪明的工程师们想到一个绝妙的办法,用光学镜头折射激光,达到多个激光发生器同等的效果。比如激光在1s内扫描1个点,如果镜头0.5s偏转一次,让激光在1s 内扫描2个点,那么就相当于有两个激光发生器,可称之为等效线数。
采用这种方案就不需要激光发生器360°转动了,也减少了激光发生器数量,大大降低成品体积,可以被集成到车身上,能被乘用车采用了。根据光学镜头和偏转方式,又可以分为这么几类:
1、旋镜方案
如下图所示,激光发生器发出的激光经过一块平面镜反射到一个棱柱状旋镜。平面镜上下翻转,可以实现激光在垂直方向上的扫描;旋镜转动实现激光在水平方向上的扫描。1个激光发生器+两个镜头就可以覆盖车辆前面一定范围的图像(实际产品中不止一个激光发生器)。采用这种方案的公司有禾赛科技和华为。以禾赛科技在2021年下半年发布的最新车规级激光雷达AT128为例,其视场角为水平120°×垂直15.4°,最高探测距离200m,尺寸137×112×147mm。
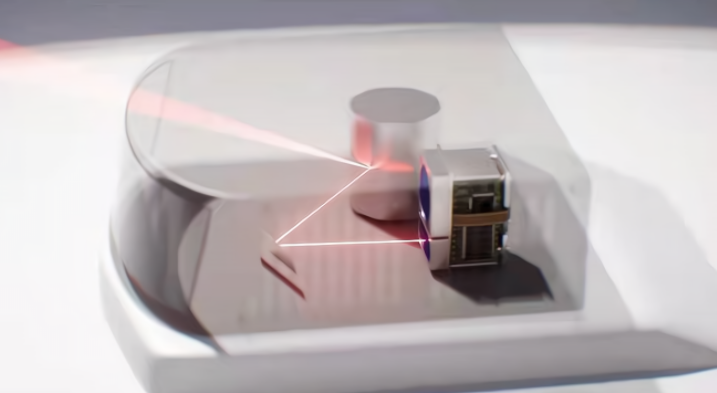
图:半固态旋镜方案激光雷达示意图
2、MEMS微振镜方案
这种方案的光学扫描部件采用MEMS工艺制作的微振镜,尺寸在微米量级。如下图所示,圆形镜片在悬臂梁的支撑下可以在上下和左右两个方向上振动,同样实现激光在水平和垂直两个方向上的扫描。

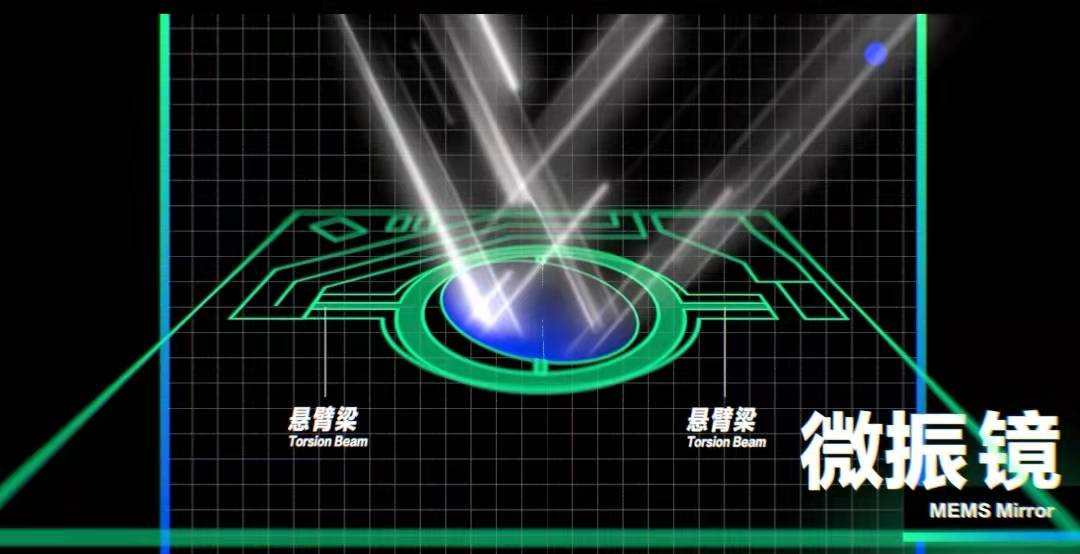
? 图:MEMES微振镜3D立体示意图 ? ? ? ? ? ? ? ?图:MEMES微振镜2D平面示意图
知名创企速腾聚创就是采取这种方案,也是目前商用的主流方案,优点是MEMS工艺成熟,成本可控,受到车厂青睐。去年广州车展上亮相的13款前装激光雷达新车型中,有接近一般都选择了这种方案。
3、棱镜方案:
光学扫描部件采用不规则的棱镜,如凸面镜、楔形镜等。好处是通过不规则棱镜的折射,可以把激光偏转到更大的范围,增大激光雷达的视场角。难点在于对光路的设计,以及对微型电机的控制。大疆的子公司览沃科技Livox就是采用这种方案,借助于大疆在无人机上积累的电机控制经验,Livox在已经发布的车规级激光雷达产品HAP上将电机尺寸轴承直径做到了5mm,转速高达7000转/min。转速越大,等效线数越大,每个目标点上有更多光线扫过,分辨率就越高。
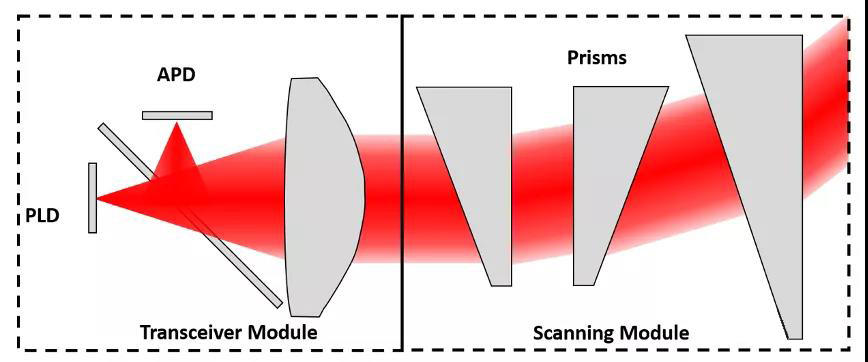
图:棱镜方案光学部件示意图
以上三种方案都是在光学扫描部件上做文章,但更高阶玩法是在激光收发部件上动心思。传统激光发生器一般采用分立器件组装形式,体积大,成本高。采用如下图所示可以集成到芯片上的垂直腔面发射激光器(VCSEL),一颗芯片就可以集成数十、上百个激光器,再加上接收部件、逻辑运算单元,一颗激光雷达专用SoC诞生了。只要芯片化,就可以用摩尔定律降低其体积和成本,加速激光雷达上车应用的步伐。
?
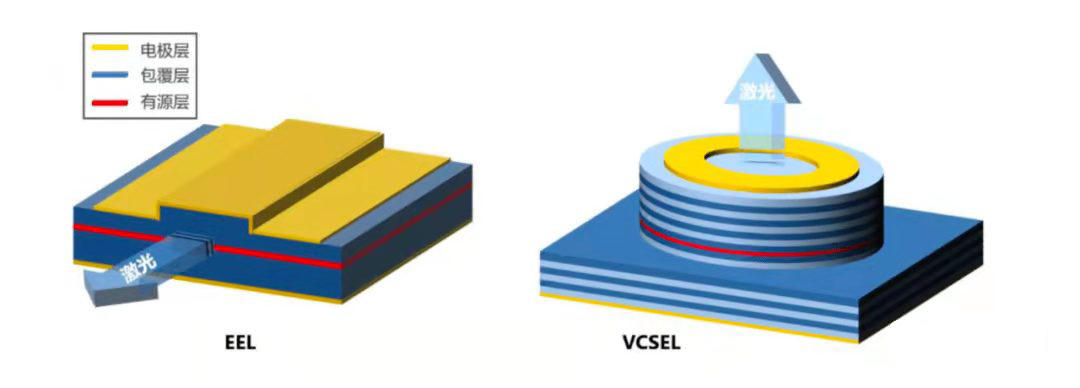

? ? ? ? ?左图:垂直腔面发射激光器示意图 ? ? ? ?右图:集成多个垂直腔面发射激光器的芯片
?
Mobileye的逆袭:FMCW对战TOF
终于轮到Mobileye出场了。2021年1月11日,Mobileye发布了一款激光雷达SoC芯片,2025年量产。探测原理采用了跟以上所有方案都不相同的调频连续波FMCW( Frequency Modulated Continuous Wave)的方案。
以上所有激光雷达探测原理都是基于飞行时间TOF:入射光打在物体表面被反射回来,接收器检测到反射光,计算光线从出射到回收的时间,就可以算出光线走过的路程,除以2就是物体与雷达的距离。目前装车商用的激光雷达产品,以及有点知名度的创企几乎全是采用这种技术路线。
Mobileye之所以会选择FMCW,是因为TOF的路上有几个不太好跳出来的坑。比如很难规避外界光线干扰的影响,这个干扰来自可能来自强阳光、也可能来自车辆自身安装的其他激光雷达,或者是别的车上搭载的激光雷达。
如今装有激光雷达的车辆数量很少,这个问题还不严重,当装有激光雷达的车辆越来越多,车辆之间激光信号的串扰问题会越来越严重。要解决这个问题常见的做法是对每一束激光脉冲进行单独编码,使其不受其他激光雷达的干扰。不过,编码会导致信噪比下降,进而牺牲测距能力。
TOF方案最大的问题是没法获取目标物体的速度信息,尤其是较远处物体的速度信息,因为物体距离越远,反射回来的激光信号越弱。但在某些场景下,比如一辆速度很快的车辆对向驶来的时候,TOF方案没法预测到这个潜在危险,到走近之后才发现留给车辆的规避时间就很短了。
再比如,下雨天车辆前轮胎会溅起水雾,水雾在TOF激光雷达射上形成的点云看起来跟车辆或其他障碍物没什么区别。这种信息会给自动驾驶决策系统造成很大的困扰。如果经常因水雾而误刹车,不仅乘坐体验很差,而且还埋下了可能被追尾的安全隐患。
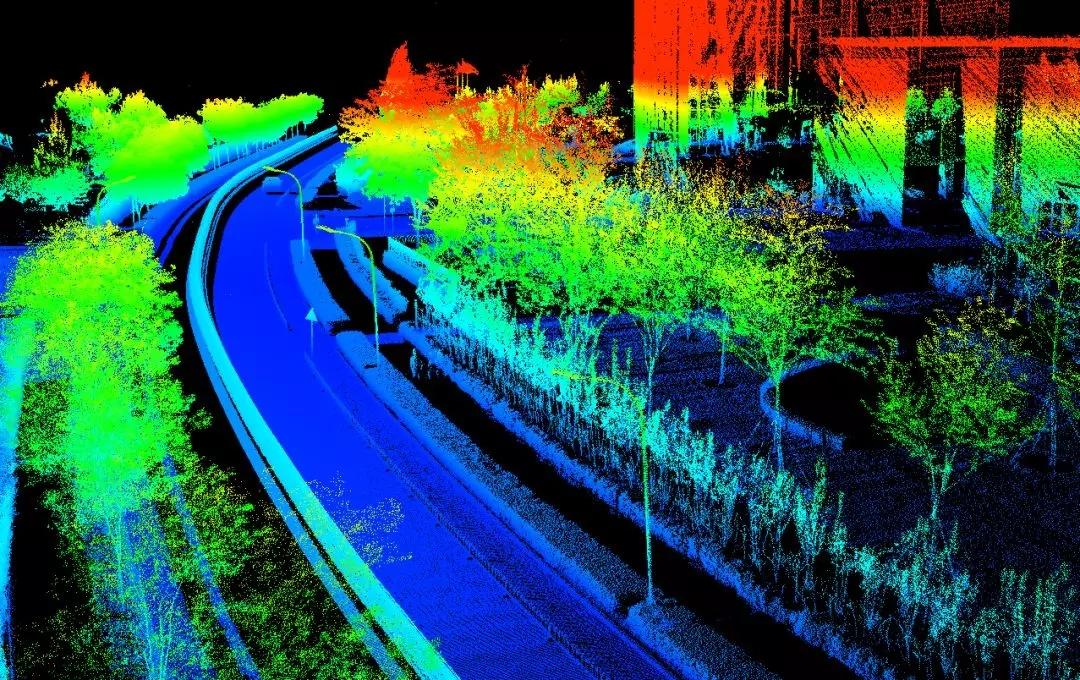
图:激光雷达扫描得到的点云图
以上困难用FMCW就很好解决。FMCW通过发送和接收连续激光束,把返回光和本地光做干涉,并利用混频探测技术测量返回光和本地光的频率差异,再通过频率差换算出目标物的距离。如果目标物靠近车辆,光频率会升高;如果目标物远离车辆,则光频率会降低,通过频率差异就能算出目标物相对于车辆的速度。
在上面那个水雾的场景下,水雾在FMCW探测图像上有明显的上升和下降的轨迹,可通过这些速度信息帮助决策系统判断出它们是“水雾”,在决策算法中将其过滤掉。另外,FMCW只对自身发射的激光产生干涉,不受其他杂光的干扰,包括太阳光等环境光,以及来自其他激光雷达的光。TOF易受外光串扰的问题也迎刃而解。
这么好的方案为什么国内几大知名的激光雷达创企没有跟进呢?原因在于,要制造FMCW芯片需要复杂的硅光子芯片制造工艺,而Mobileye的东家Intel在服务器领域有强大的光纤收发器产品线,积累了丰富的硅光子芯片制造工艺,可以帮助Mobileye解决研发和制造上的难题。
在2021年CES上,Mobileye CEO Shashua在演讲中是这么说的:“我们激光雷达的性能预计会超过市场上任何已知的解决方案,能够使激光雷达本身成为一个单一的、完整的、独立的感知系统。”
当业界还在感叹昔日ADAS的霸主Mobileye在高阶自动驾驶上逐渐掉队的时候,殊不知,人家正在酝酿着一次终极反击。
