新型无人机系统旨在实现完全自主飞行
苏黎世大学的一个工程师团队开发了一种开源四旋翼无人机,用作试验台,以加速对敏捷、自主飞行的研究。
“Agilicious”平台旨在通过提供标准化的模块化平台来解决与技术发展相称的复杂飞行问题,从而为该领域的研究人员的工作提供支持。
敏捷飞行带来了越来越多的工程挑战,因为使用自主系统执行更快的机动需要更强大的算法、专业的硬件和系统集成的熟练程度,研究成果发表在《科学机器人》上。
这项工作旨在通过开源敏捷飞行平台弥合这一差距,使每个人都能以最小的工程开销实现敏捷自主。
Agilicious 提供了完全自主所需的计算能力,机身小巧、轻便且功能强大,足以满足下一代飞行需求。
该平台为飞行敏捷性提供高推重比和扭矩惯性比,以及机载视觉传感器、图形处理单元 (GPU) 加速计算硬件、实时飞行控制器和多功能软件堆栈。
无人机本身由现成的零件制成,包括为 5 英寸螺旋桨提供动力的无刷电机。
该飞机可以以超过 5g 的加速度进行敏捷飞行,最高时速可达 80 英里。据研究人员称,它的设计利用了第一人称视角赛车社区在电机、电池和框架结构方面的最新进展。
该团队对 Agilicious 进行了模拟和真实世界的测试,以评估其作为测试工具的能力。在一项轨迹跟踪实验中,无人机达到了每小时 35 英里的速度和 4G 的加速度。经过多次算法开发迭代和大量调整工作,无人机能够完成课程。
从模拟到实际部署的过渡不需要更改或调整源代码,这降低了昂贵硬件崩溃的风险,并且是 Agilicious 加速快速原型设计的主要功能之一。
自主、灵活的飞行有望在现实世界中得到应用,例如在搜索和救援、空中交付、飞行汽车以及探索等时间紧迫的任务中。获 取 更多前沿科技?研究 进展访问:https://byteclicks.com
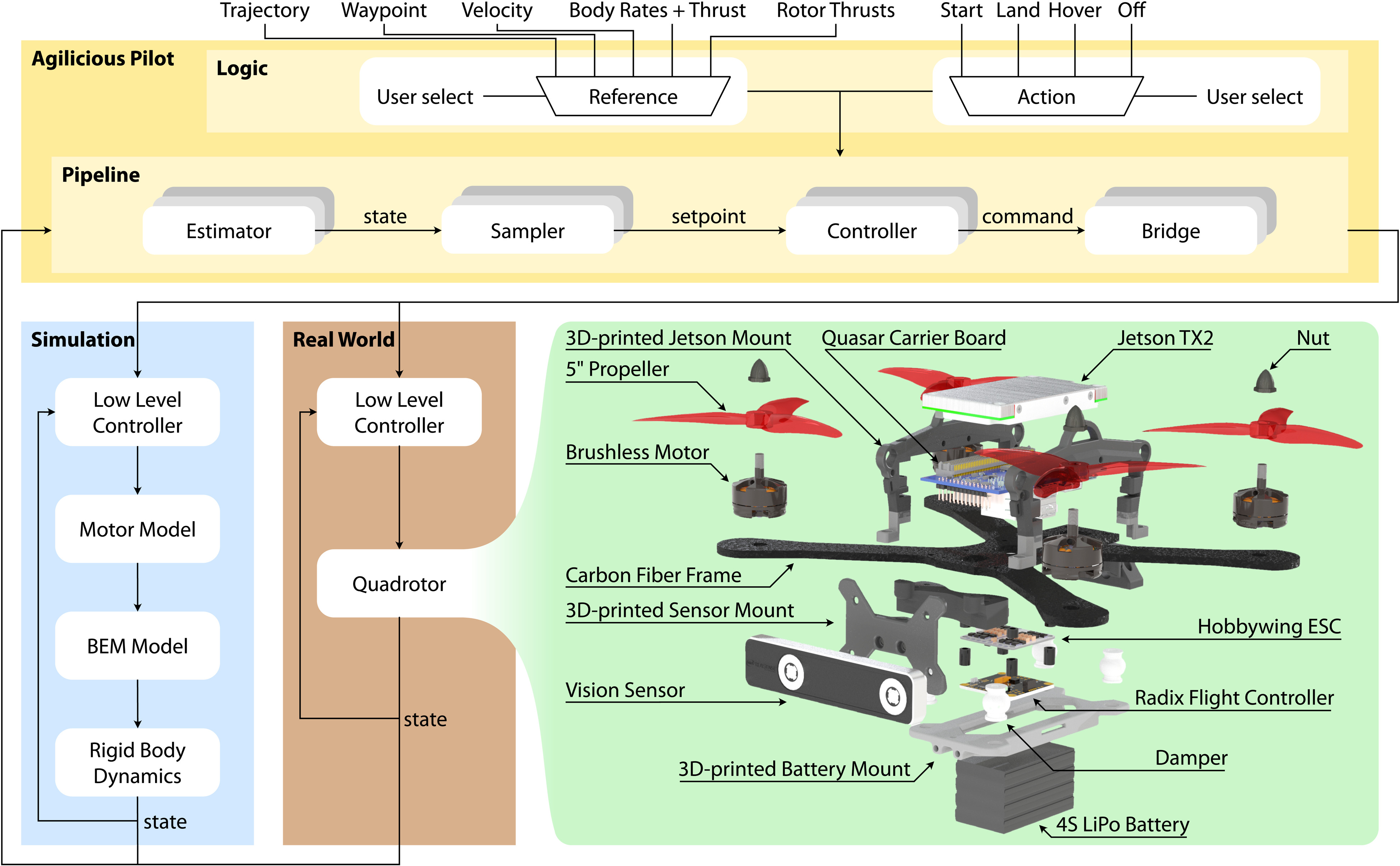
Agilicious 软件和硬件四旋翼平台专为敏捷飞行而量身定制,同时通过 NVIDIA Jetson TX2 提供强大的机载计算能力。
版权声明:除特殊说明外,本站所有文章均为 字节点击 原创内容,采用 BY-NC-SA 知识共享协议。原文链接:https://byteclicks.com/39418.html 转载时请以链接形式标明本文地址。转载本站内容不得用于任何商业目的。本站转载内容版权归原作者所有,文章内容仅代表作者独立观点,不代表字节点击立场。报道中出现的商标、图像版权及专利和其他版权所有的信息属于其合法持有人,只供传递信息之用,非商务用途。如有侵权,请联系 gavin@byteclicks.com。我们将协调给予处理。
赞
