MIT设计出一种可改进任何自主机器人系统的方法
美国麻省理工学院(MIT)的科研团队为机器人专家开发了一种通用的设计工具,可用于模拟几乎任何自主机器人系统的优化代码,还可以自动识别如何以及在何处调整系统来提高机器人的性能,从而加速步行机器人、自动驾驶车辆和其他自主系统的设计优化。
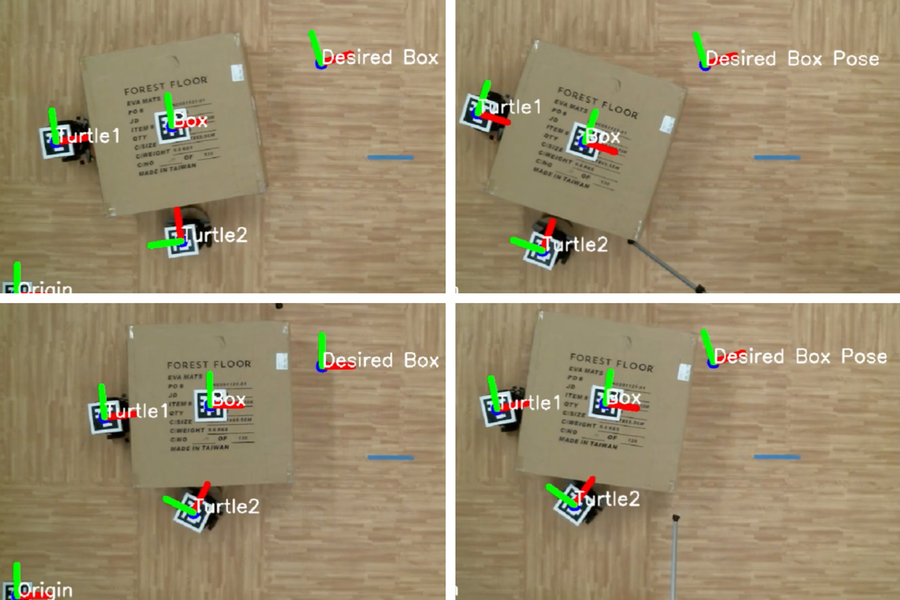
该代码的核心基于一种由机器学习社区开发的自动差分(“autodiff”)编程工具,最初被用于训练神经网络,是一种快速高效评估计算编程程序对任意参数变化敏度的技术。目前,该团队已经在两个独立的自主机器人系统上进行了测试。测试结果表明,与传统的优化方法相比,该工具在实验室试验中可更快速改善每个系统性能。
研究人员表示,“如果系统中有很多参数需要优化,该工具可以做得更好,可以成倍的节省更多时间。就好比一种组合选择,随着参数数量的增加,选择也会增加,这种新型优化工具一次即可大大缩减可能的选择”。
该团队已经提供了通用优化器的下载渠道,并计划进一步完善代码,以便应用于更复杂的系统中。该团队还将于下月在美国纽约召开的《Robotics: Science and Systems》年会上宣读相关论文“Certifiable Robot Design Optimization using Differentiable Programming”。
该项研究得到了新加坡国防科技局和MIT-IBM沃森人工智能实验室的支持。获 取 更多前沿科技?研究 进展访问:https://byteclicks.com
版权声明:除特殊说明外,本站所有文章均为 字节点击 原创内容,采用 BY-NC-SA 知识共享协议。原文链接:https://byteclicks.com/39043.html 转载时请以链接形式标明本文地址。转载本站内容不得用于任何商业目的。本站转载内容版权归原作者所有,文章内容仅代表作者独立观点,不代表字节点击立场。报道中出现的商标、图像版权及专利和其他版权所有的信息属于其合法持有人,只供传递信息之用,非商务用途。如有侵权,请联系 gavin@byteclicks.com。我们将协调给予处理。
赞
