基于粘滑传感策略的多功能仿生触觉系统,创新人机交互模式
多功能触觉感应是人机交互(HMI)与环境交互的重要方式。为了实现更自然与功能性更强的触觉交互体验,研究人员不断尝试开发在力感应、材料分类、粗糙度辨别等方面性能更佳的触觉传感器。
据麦姆斯咨询报道,近日,中国科学技术大学纳米技术与纳米仿生学院张珽课题组开发出一种基于粘滑(stick-slip)传感策略的多功能仿生触觉系统,该系统在滑动检测、材料分类和粗糙度识别等方面具有非常高的精准度,其独特的传感机制为分析物体材料特性提供了创新的方法。相关研究成果已发表于npj Flexible Electronics期刊。
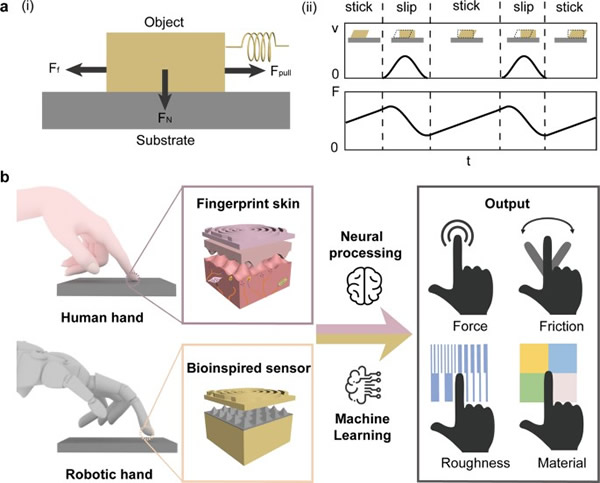
柔性触觉传感器设计与粘滑特性密切相关。柔性触觉传感器在物体表面滑动时会出现粘滑现象,导致传感器信号出现波动,此外,在不同物体上滑动时的波动也不同。受到该传感机制的启发,研究人员设计了一种指尖触觉传感器,该传感器包括受指尖表皮启发的双螺旋顶层和受棘突启发的锥体层,分别用于传输从粘滑现象和敏化获得的振动。基于此,研究人员进一步搭建了一个多功能仿生触觉系统,由指尖触觉传感器、读出电路和机器学习模块组成。这种新兴的机器学习系统能够有效读取信息,并且多种算法都可以适用于触觉数据处理。
基于粘滑传感策略和指尖启发的多功能仿生触觉系统
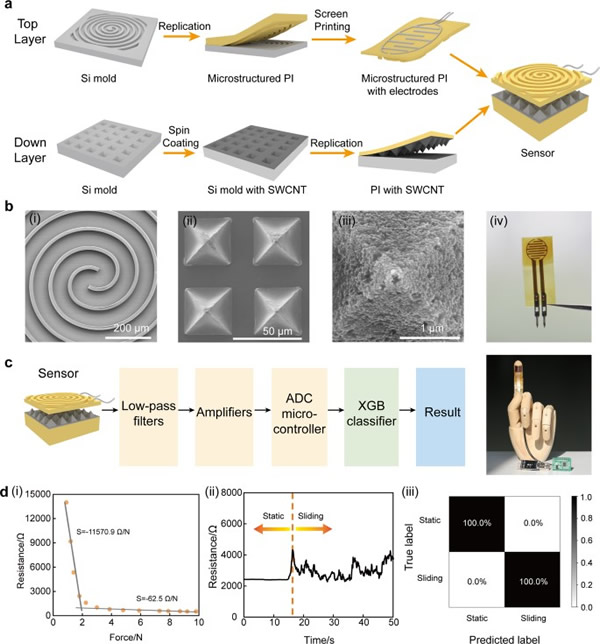
指尖触觉传感器的制造、表征和性能
这款多功能仿生触觉系统展示了出色的滑动识别能力,对静态和滑动状态的识别准确率高达100%,可区分六种材料(识别率93.3%)和六种不同粗糙度(识别率92.8%)。除了多功能传感之外,该系统还具备感测轻触、重触和滑动的能力,可为机器人手灵巧的操作提供精准反馈。
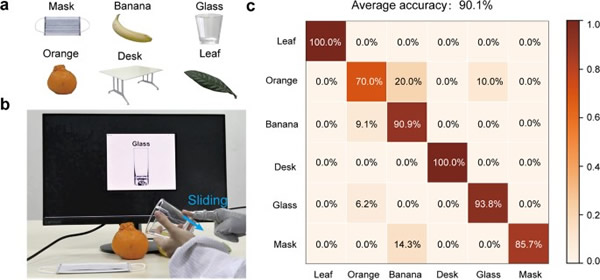
用于物体识别的多功能仿生触觉系统
此外,该系统还能实现机器人手部操作、交互式游戏和对象分类等功能。研究人员建立了基于多功能传感系统的互动游戏,通过将该传感器戴在指尖上,执行特定的动作来玩超级马里奥游戏。操作过程中,通过轻触、重触和滑动等食指动作,可以控制马里奥前进、返回和跳跃。进一步展示了该多功能触觉系统具备潜在丰富的人机交互模式。
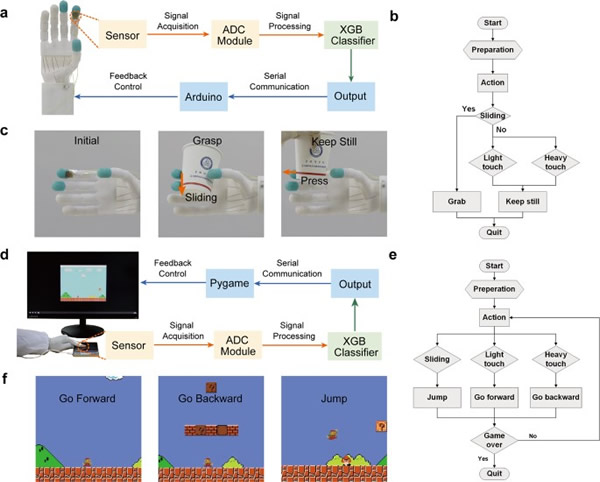
机器人手的闭环控制和交互式超级马里奥游戏的辅助多功能触觉系统
研究人员称,接下来还需要进一步开展研究工作,通过集成更高密度的传感器阵列实现物体形状感知,增强机器学习算法的独立性,优化滑移预测机制以及降低系统功耗,进而推动该多功能仿生触觉系统在人机交互中实现更广阔、全面的应用前景。
论文链接:https://doi.org/10.1038/s41528-022-00183-7
延伸阅读:
《触觉技术及市场-2021版》
《电子皮肤贴片技术及市场-2021版》
《可穿戴技术及市场-2021版》
《印刷和柔性传感器技术及市场-2021版》
相关热词搜索:触觉传感器 人机交互
延伸阅读:
- ·只需按压即可测量摩擦系数的触觉传感器(2016-01-29)
- ·传感器疏察,被愚钝的机器人“国产触觉”(2018-04-25)
- ·触手可知——人工传感器模拟人体触觉(2018-11-11)
- ·重庆研究院在高灵敏石墨烯触觉传感领域取得进展(2019-06-07)
- ·西交大在工程化水凝胶可穿戴医疗传感领域取得重要进展(2021-01-01)
