DMD芯片最重要的特点之一就是分辨率
在机器人应用和自动驾驶应用领域,3D机器视觉一直是最受欢迎的领域。借助数字3D扫描数据可以提取物体的表面积、体积和形体尺寸。结构光是一种广泛应用于物理尺寸捕捉的光学技术BUL58D。
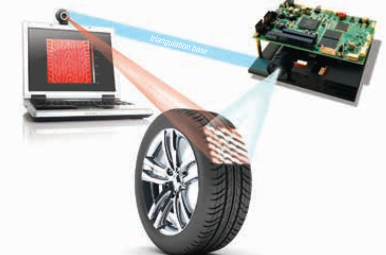
(TI,结构光例)
将这些扭曲和变形通过图像处理和三角分割算法转化为3D点云数据,通过检测图形投射到另一个物体上的扭曲和变形。视觉能力直接关系到点云生成的准确性。TIDLP技术的结构光系统在行业中享有盛誉,当需要快速、高精度地扫描毫米甚至微米分辨率时。TI数字微镜设备(DMD)技术可与摄像机、传感器、电机等外部设备集成,可轻松构建3D点云,灵活控制工业、医疗和安全应用。
DLP技术的核心是DMD成像器件。
在DLP技术性中,核心设备是DMD成像设备。在DMD成像设备中排列着许多小镜片,每一个镜片都是根据数字信号操纵单独开展偏转动作。当光线投影到DMD芯片中时,光线会依据镜片的偏转方向传送到不一样的视角,进而完成显示信号。最早的DMD设备仅有840个微镜片,如今一台DMD设备在对应的CMOS存储单元上构建了最多800万个微镜片。DMD芯片支撑点35nm紫外线,2500nm红外线,快速32kHz,可编程图形刷新率。这代表着可以实时获得移动物件的3D扫描数据,进一步优化DLP系统对好几个物件和环境的扫描速率和精确性。
DMD芯片最重要的特点之一就是分辨率。目前DMD芯片的范围可覆盖像素广泛,高达400万像素。较大的MPDMD设备将更适合扫描面积较大或光线环境较强的设备。这些设备主要用于机器视觉应用。在便携式低功耗小型设备中,小于1-MP的DMD设备更为常见。
DLP系统可以调节颜色和照明强度,使设备更容易与各种光源结合,结合生物3D识别的近红外波,优化紫外线的金属反射特性等。DLP系统采用反射和可靠的MEMS微镜组开关。对颜色、距离、运动和环境的最小敏感性提高了设备在整个温度范围内的性能。
3D机器视觉使用DLP。
对于机器视觉应用来说,DLP芯片组的最佳选择取决于检测对象、图形速度和系统形状尺寸的形状尺寸。还需要考虑芯片组本身的特征,如移植、分辨率和速度特征。
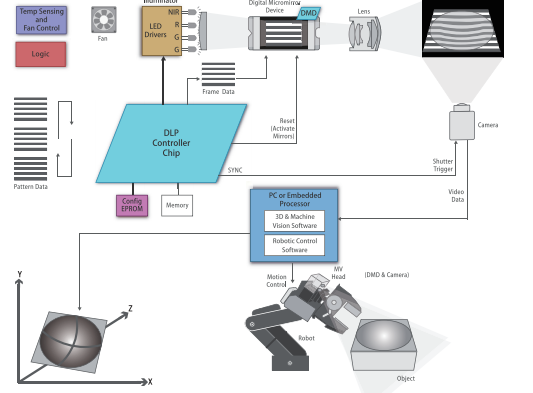
(TI、3D机视觉DLP方案)
以DLP4500为例,DLP4500在可移植性方面更为突出,空间光调制器SLM,快速、准确、高效控制近红外和生成图案。虽然被认为是高可移植的代表,但其912×1140的分辨率阵并不低,再加上紧凑的外观,DLP4500DMD和单元探测器可以取代昂贵的探测器设计基于Inagas阵列。这一特点也反映在设备与多种光源和波长相匹配后,可以实现更多功能。
超高分辨率的DLP芯片组在机器视觉上应用较多,一般在400万微镜以上。超高分辨率直接体现在识别大物体上,直接提升了机器视觉的扫描能力。由于其可编程性,将对光谱、空间和时间域的性能进行优化。确切地说,在设备工作时,可以对图案进行动态选择和重新排序,以帮助提取最精确的3D信息。
(TI,DLP芯片组)
至于高速特性,目前最大图像速率是32552Hz(1位图形速率),是DLP系列组合中模式速率最快的。对于需要DLP产品组合中的最大像素间距和最快图形速率选项的设计人员而言,这是目前最高性能的选择。
写在最后
在DLP芯片组中,除了DMD,其支持控制器也很重要。DLP控制器将支持预存结构光影像,无需外接视频处理器传输影像,对设备的高速显示很有帮助,否则设备很难达到高刷的上限。如果控制器还有摄像机同步功能,将进一步提升影像率,实现更高性能的3D机视觉扫描。
