斯坦福工程师开发微型机器人,使医疗保健更接近精确靶向药物输送
生物医学研究人员最近开始探索在治疗更复杂的疾病(如心血管疾病或癌症)时改善靶向药物输送的方法。在这个蓬勃发展的生物医学领域中,一个有前途的创新是millirobot。这些指尖大小的微型机器人有望成为医学界未来的救星——爬行、旋转和游泳,以进入狭窄空间,执行其研究内部运作或分配药物的任务。
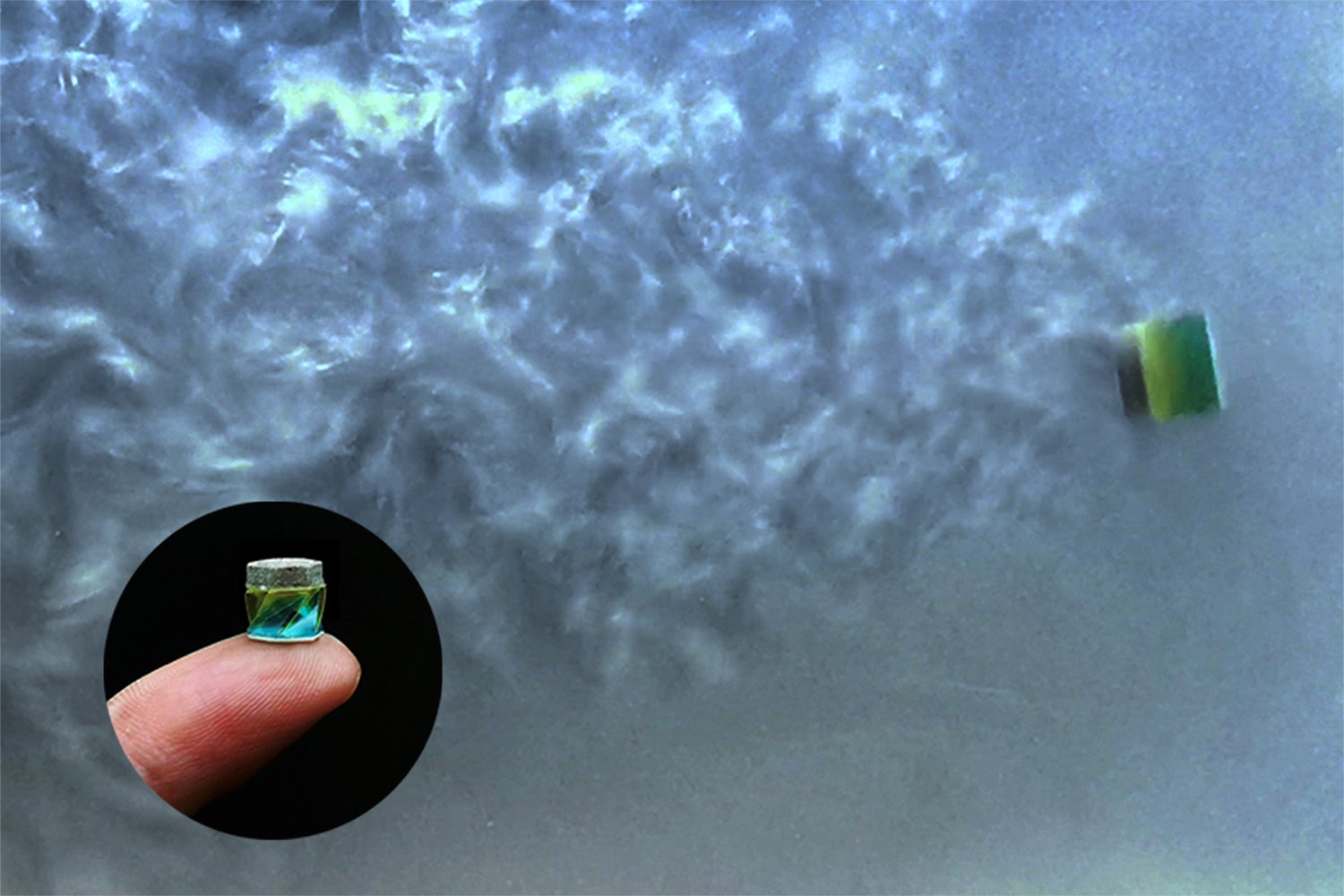
在这一领域的领先研究,斯坦福大学机械工程师?Renee Zhao?正在同时进行许多微型机器人的设计——包括一个?磁性爬行机器人,该研究最近在《科学进展》的封面上,该医疗微型机器人由磁场提供动力——允许连续运动,并且可以立即应用以产生扭矩并改变机器人的移动方式。
磁驱动还为非侵入性操作提供不受束缚的控制,并将控制单元与设备分开以实现小型化。
这种微型机器人不仅可以提供一种有效分配药物的便捷方式,还可以用于将仪器或照相机携带到体内,从而改变医生检查病人的方式。该团队还致力于使用超声波成像来跟踪机器人的去向,从而消除任何侵入性手术的需要。
这项研究由美国国家科学基金会和美国心脏协会资助。获 取 更多前沿科技?研究 进展访问:https://byteclicks.com
版权声明:除特殊说明外,本站所有文章均为 字节点击 原创内容,采用 BY-NC-SA 知识共享协议。原文链接:https://byteclicks.com/38740.html 转载时请以链接形式标明本文地址。转载本站内容不得用于任何商业目的。本站转载内容版权归原作者所有,文章内容仅代表作者独立观点,不代表字节点击立场。报道中出现的商标、图像版权及专利和其他版权所有的信息属于其合法持有人,只供传递信息之用,非商务用途。如有侵权,请联系 gavin@byteclicks.com。我们将协调给予处理。
赞
