研究人员为无人机打造MIP无源机械抓手:巧妙结构支持轻松提放
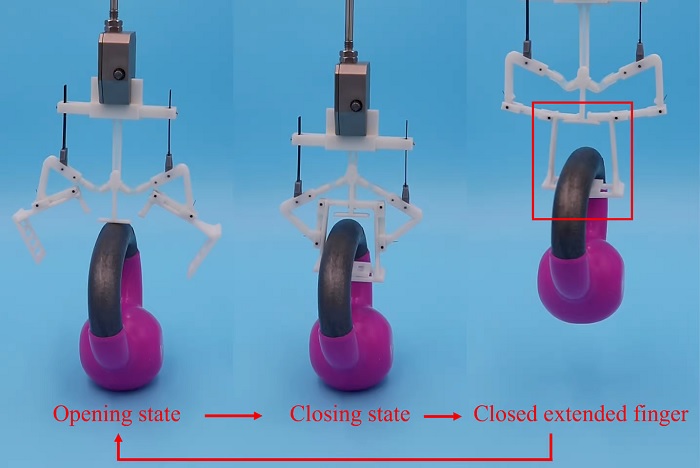
研究人员试着将“MIP”套件安装在了多轴无人机的顶部或下方,类似两节手指的搭扣设计也颇为巧妙。

实验室测试期间,它们在一个 5 磅(2.3 公斤)重的壶铃身上完成了相关操作验证。
在升空后,MIP 的提手能够可靠地将重物带到空中。而在卸载物品时,其提手又能够如预期那样松开。
此外研究人员还演示了一种将 MIP 安装在顶部,以便无人机能够悬吊停靠的机械设计。
(来自:IEEE / ASME Transactions on Mechatronics)
此前由科罗拉多州立大学机械工程系 Jianguo Zhao 博士带领的该团队,已于两年前演示过这项技术的早期版本。但是 MIP 的不同之处,在于它无需外部动力来释放爪子。
A Mechanically Intelligent and Passive Gripper(via)
得益于无源方案,它能够让无人机更轻松地从悬挂状态中释放、并且能够承载更大的物品重量 —— 旧型号仅能携带 30 克(1 盎司)有效载荷,而 MIP 大幅提升到了 3.7 公斤以上(8 磅)。
