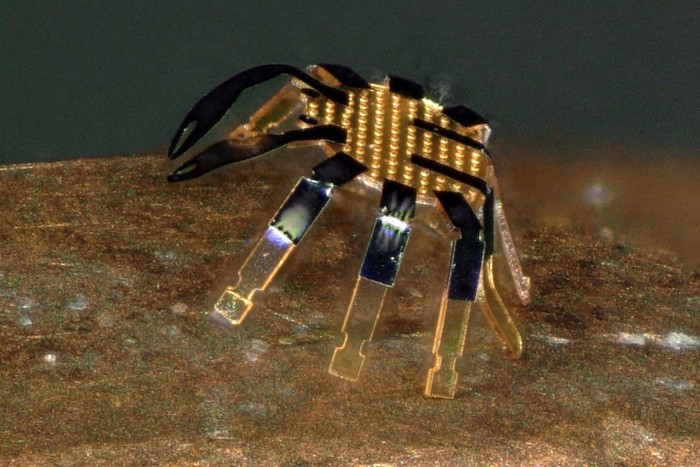
科学家展示世界上最小的遥控行走机器人 使用形状记忆合金制造

这些机器人是使用形状记忆合金材料制造的,然后将其变形为所需的形状。将这些合金加热后,它们会弹回原来的形状,而当热量消失时,一层薄薄的玻璃涂层能够将它们弹性地弹回变形的形状。
在这种情况下,热量是由扫描激光器提供的,它通过“螃蟹”来加热合金。由于它们是如此之小,热量散布的速度极快,使得它们的反应速度甚至达到每秒10次,令人惊讶。激光扫描的方向决定了运动的方向--向右扫描,“螃蟹”就会向右走--仅仅是由于腿部动作的时间。该团队以每秒一半身体长度的平均速度对它们进行了计时。
然后,他们尝试了一些不同的几何形状,包括可以通过旋转扫描激光诱导其转动的水上行走三脚架结构,能够进行小幅度跳跃的卷曲结构,以及能够进行扭曲和其他运动的其他结构。
制造过程相当吸引人--该团队将机器人制造成扁平结构,这是它们的加热状态。然后,他们将平面结构粘合到一个拉伸的橡胶基质上,但只在脚点处。然后,橡胶被放松,缩小了机器人的足迹,并使它们在一个受控的屈曲过程中弹出表面,使它们处于最终的三维"冷却"位置,在那里可以应用玻璃涂层来保持它们的形状,直到被加热。

领导这项实验工作的材料科学与工程教授 John A. Rogers说:“机器人学是一个令人兴奋的研究领域,微尺度机器人的开发是一个有趣的学术探索课题。你可能会想象微型机器人作为代理人,在工业中修复或组装小型结构或机器,或作为外科手术助手,清除堵塞的动脉,停止内部出血或消除癌症肿瘤--所有的微创手术。”
当然,将它们想象成这样需要我们想象如何将有针对性的激光加热到它们被设计为操作的微小空间中--这在身体内是不简单的前景。所以还有很多工作要做。
“有了这些装配技术和材料概念,我们可以建造几乎任何尺寸或三维形状的行走机器人,”Rogers说。“但学生们对小螃蟹的侧向爬行动作感到很受启发和有趣。这是一种创造性的突发奇想。”
这项研究可在《科学·机器人》(Science Robotics)杂志上查阅。
