结合手机惯性传感器的地下定位算法研究
随着我国城镇化的快速发展,城市人口不断增多,为满足人们对空间容量的需求,城市生存空间已经从地上扩展到了地下,包括轨道交通、商业设施、地下车库、高层建筑地下空间等。地下空间的合理开发利用,能够有效解决交通拥堵、土地资源缺乏等问题,实现城市集约化发展,进一步提高城市的用地效率。然而,与地上空间相比,人们在地下空间活动仍存在许多不便之处,其中之一便是地下位置信息获取困难。由于高层建筑物的遮挡,在地下空间不能接收到卫星信号,导致基于全球导航卫星系统的定位方式受限。
在无全球导航卫星信号环境中可以利用RFID、WiFi、蓝牙进行位置推算,但需要额外的硬件设备支持,同时地下空间较为封闭,若布置大量电磁信号发射器,易造成信号干扰,影响定位精度。基于惯性传感器的步行者航位推算(PDR)不受外部环境的影响,适合地下定位使用,是目前的研究热点之一,但易产生较大的累积误差,影响定位精度。针对该问题,文献[4]提出通过某些特定位置的轨迹特征来校正误差,但需要进行大量样本训练,若特征性地标(如楼梯、走廊)较少时,定位效果不能保证。考虑地下空间路径规划较为规则、方向性较强,本文提出角度累积匹配法,通过手机集成的惯性传感器获取航向及步态信息,以路径的方向改变量为特征对累积误差进行纠正,从而获得最终定位结果。
1 手机惯性传感器地下定位原理
本文利用智能手机的内置惯性传感器进行航位推算,获取在地下空间的移动轨迹和位置信息。通常情况下,智能手机均内嵌有光线、距离、重力、加速度、磁场、陀螺仪等传感器,尽管内嵌式传感器在精度、抗干扰性等方面存在一些不足,但其具有普及性高、使用方便等优势,与PDR相结合,能够满足人们的部分需求。
PDR是指通过对加速度、磁场、陀螺仪获取到的数据进行处理,获取使用者的行走状态,包括步态检测、步长估计和航向推算,根据方向和在此方向上行走的步数、步长来确定行走路径,进行实时定位。由于实现方式仅依赖于其内部的惯性传感器,故利用PDR进行定位具有不依赖外界信号源、可连续实时定位等优势,但同时也造成了其误差易积累、受惯性传感器噪声信号影响较大的结果,因此需使用相关滤波算法对相应传感器获取的数据进行预处理,并设计合理的误差纠正方法校正其累积误差,基本流程如图 1所示。
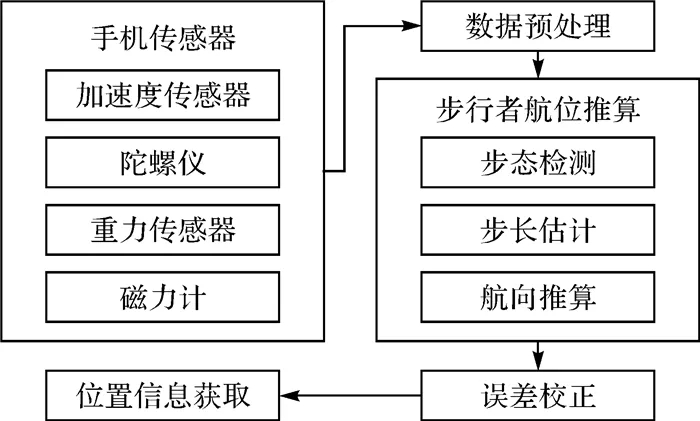
图 1 手机惯性传感器地下定位基本流程
2 航位推算
航位推算包括步态检测、步长估计、航向推算3部分,通过选择合适的传感器数据,并对已有算法进行改进,能够有效提高步态及方向的判断准确率,降低定位误差。
2.1 坐标系介绍
为利用手机传感器推算出行走状态,需要明确手机坐标系和行人坐标系。手机坐标系是手机内部传感器所使用的坐标系,如图 2所示,x、y、z 3轴正交,其中x轴平行于手机底部指向右侧,y轴平行于手机侧面指向手机顶部,z轴垂直于手机屏幕所在平面指向上方。行人坐标系X、Y、Z 3轴正交,其中X轴垂直于行走方向指向行人右侧,Y轴与水平面平行指向行走方向,Z轴竖直向上。
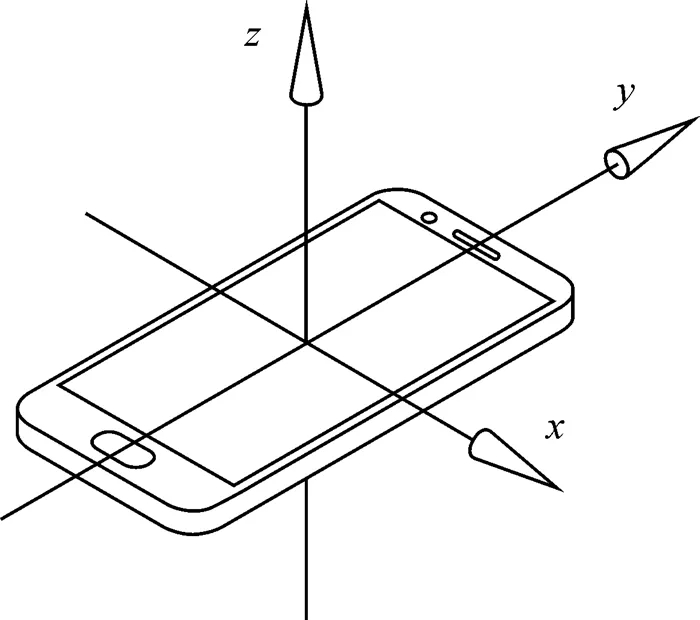
图 2 手机坐标系
2.2 步态检测
步态检测指对行人行走步数的判断,对此进行的研究也较多,由于每次行走会使加速度计产生一个震动周期,因此常用加速度零点检测法、峰值法和傅里叶变化法来进行步态检测。手机内部加速度计为3轴加速度计,由于实际情况下手机姿态复杂多变,而人在行走时左右脚交替带来重心的改变主要体现在行人坐标系的Z轴方向,手机坐标系与行人坐标系之间的不确定关系给步态检测带来了一定的困难。为解决这一问题,有学者提出将加速度计固定在人体某处,使加速度计姿态保持不变,此方案虽然能够取得较好的检测效果,但不适用于将手机作为数据采集终端。也可求取三轴加速度计在手机坐标系x、y、z 3个方向上的加速度幅值a(式(1)),此方案对手机的姿态没有要求,且计算简单,但求取加速度幅值的过程中代入了非重力方向上的加速度扰动,降低了步态的辨识度。

(1)
式中,ax、ay、az分别为加速度计在手机坐标系x、y、z 3个方向上的加速度值。
由于手机中内置传感器中包含有重力传感器,其3轴矢量和指向重力方向,因此本文考虑利用重力传感器x、y、z 3轴上的分量数据,计算出手机的姿态,从而得出手机加速度计在行人坐标系Z轴方向上aZ的变化情况。
(2)
(3)
(4)

(5)
(6)
式中,gx、gy、gz分别为重力传感器在手机坐标系x、y、z 3轴方向上的读数;t为数据采集开始时间;Δt为数据采集频率f的倒数;ax、ay、az分别为加速度传感器在手机坐标系x、y、z 3轴方向上的读数。
在步态检测阶段,本文对波峰波谷检测法进行了改进,利用相邻波峰(谷)之间正向差值Δei的变化快慢S′aZ作为行走窗口的判断依据(式(8)),行走窗口内的S′aZ>δ的波峰个数即为步数。其中以f为滑动平均滤波后剔除小于2的值后得到S″aZ,利用式(9)取频数最高的区间中值为δ。

(7)

(8)
(9)
为检验此算法是否能够适应手机不同姿态准确检测出步数,本文将手机屏幕分别垂直于x、y、z 3轴各走30步,以f=5 Hz的频率采集数据。基于加速度幅值的波峰波谷检测法处理结果如图 3所示,本文改进后的处理结果如图 4所示,可以看出改进算法能有效滤除扰动,保留行走产生的波峰特征[15]。
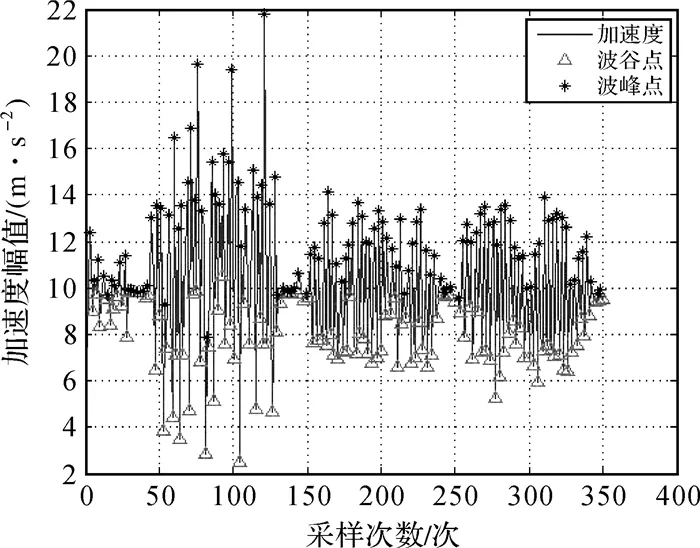
图 3 基于加速度幅值的波峰波谷检测法
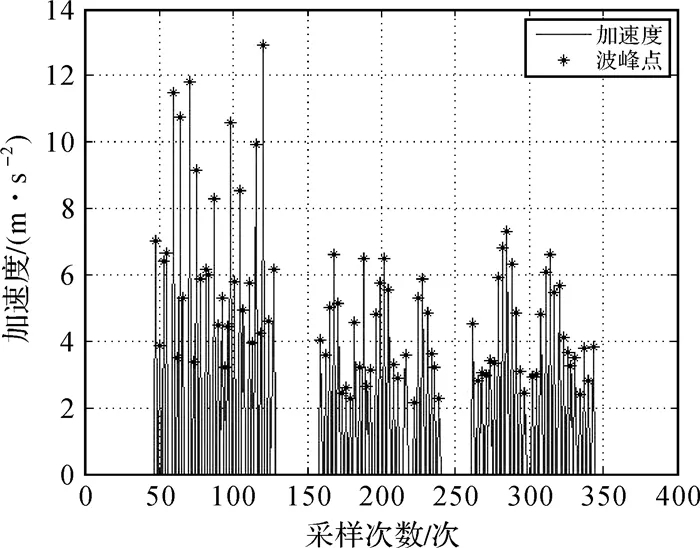
图 4 改进后的步态检测法
2.3 步长估计
由于步行者航位推算定位是无源定位,其位置移动距离的确定基于每步的步长,因此步长估计是关键的一环。根据相关研究,人们在走路时单步步长S与步频F呈线性相关,其关系如下

(10)
2.4 航向推算
手机中内置的磁力计可以利用地球磁场直接确定方向,该方法简单,在无电磁干扰的情况下有很好的定向精度,但环境中若有大型电磁发射源、铁磁体(如汽车、电梯)等物体,很容易对地磁场造成干扰,从而影响定向的准确性。由于此方法并不稳定,本文采用陀螺仪与重力传感器相结合的方法,计算出行人在Z轴方向上的旋转角度θZ,从而确定航向,避免了外界环境的干扰,提高了定向的稳定性。

(11)式中,
分别为陀螺仪在手机坐标系x、y、z 3轴上的分量。
3 特征角度匹配校正
由于在步长估计及航向推算中数据不可避免地会产生误差,若不对其进行校正,长时间、长距离地使用会使所产生的误差累积到难以忽略的程度,严重影响定位精度,甚至会给使用者完全错误的定位信息,因此需对定位结果进行校正,消除累积误差。考虑地下活动空间路径较为规则,人们行走转向角度与路径角度相匹配,因此可以结合地下空间平面地图的路径转向角度作为匹配基准对航向、距离累积误差进行校正,提高定位精度。其具体方法如下:
设地下空间坐标系为X′OY′,沿道路(走廊)选择其中i个拐点作为特征点,标记其坐标值(X′i,Y′i)和角度wi。在行走过程中,检测到手机在ΔT=10F-1时间内航位偏转累积量ΔθZ,以及所对应的定位坐标(Xp,Yp)在式(12)的区间内时,判定其ΔT/2时的定位位置在第i个拐点处,从而以坐标值(Xi,Yi)为真值来校正定位坐标。
(12)式中,μ为误差累积系数,依据经验取μ=5%;a为建筑物在X′方向上的最长距离值;b为建筑物在Y′方向上的最长距离值。
4 试验仿真
为验证以上航位推算及校正算法,本文选择中国矿业大学(北京)教学楼地下一层为试验场地进行验证。
4.1 试验区介绍
试验区为钢筋混凝土建筑,建筑面积约1 974.45 m2,内部无WiFi、GPS信号,且蜂窝网络和通信信号较差。其在X′方向上的最长距离为55.05 m,在Y′方向上的最长距离值为83.9 m,走廊为较为规整的“工”字形,在其中选取两个特征点A、B,其坐标为A(0, 32.6)、B(0, -32.4),w1=w2=90°,如图 5所示。
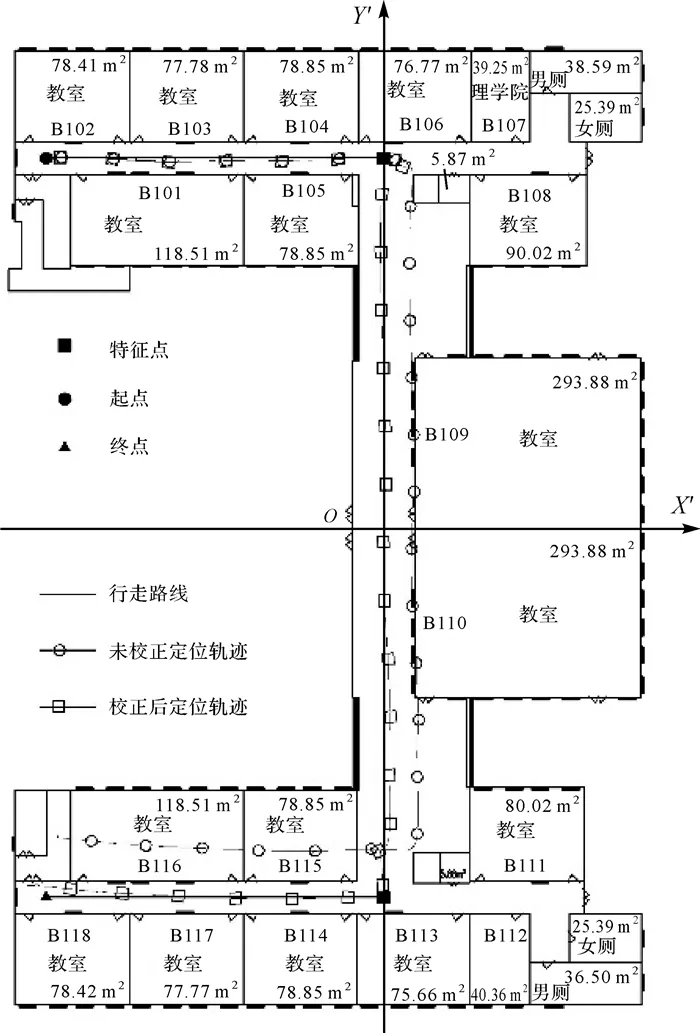
图 5 试验场地及定位校正前后对比
4.2 试验验证及误差分析
试验使用的手机终端为小米6,其内置的传感器类型及主要参数见表 1,采样频率设置为50 Hz。试验者携带手机从起点出发,沿规划路径到达终点,总长度约125 m,试验处理结果如图 5所示。
表 1 传感器类型及主要参数
| 传感器类型 | 设备名称 | 识别率 |
| 加速度传感器 | ICM20690 Accelerometer | 0.002 396 |
| 陀螺仪 | ICM20690Gyroscope | 0.001 068 |
| 重力传感器 | Gravity | 0.002 396 |
根据规划行走路线、未校正定位轨迹、校正后定位轨迹之间的坐标差值,计算坐标误差f(式(13)),其误差曲线如图 6所示,误差频数统计直方图如图 7所示。
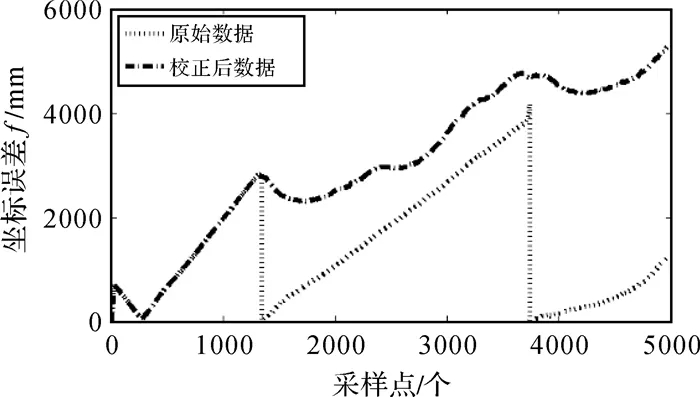
图 6 误差曲线对比
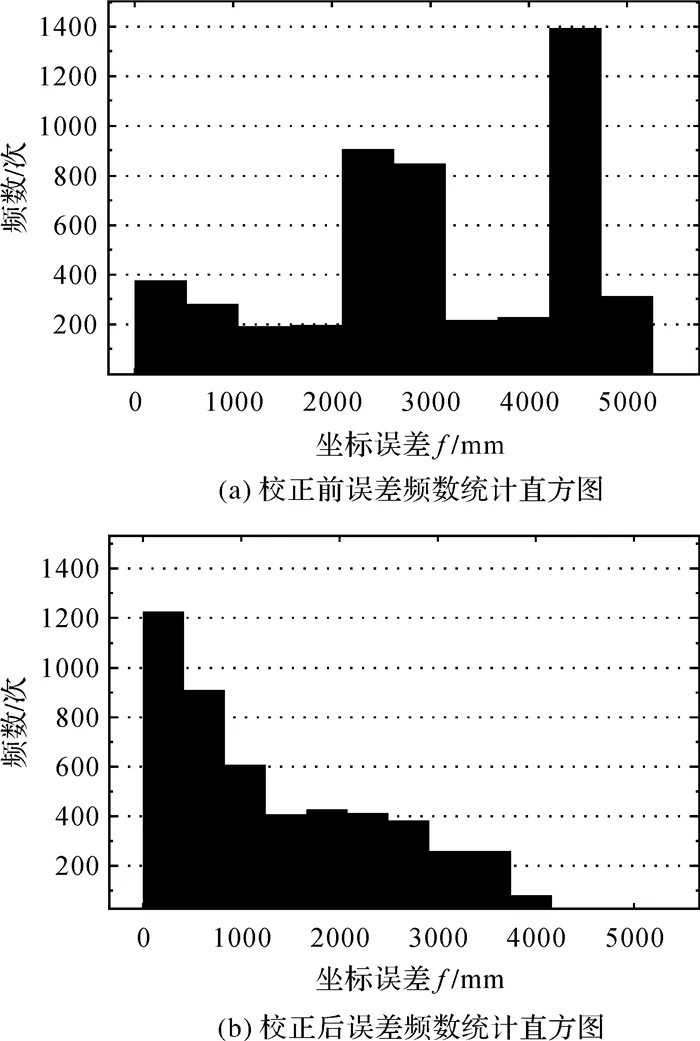
图 7 误差频数统计直方图

(13) 通过数据处理及误差分析可以看出,依据特征角度匹配进行校正的效果显著(见表 2),平均定位误差降低了54.53%,校正后88.81%的定位误差不超过3 m,平均定位误差为1.378 4 m,能够满足大多数人的定位需求。
表 2 校正前后误差对比
| 校正前后 | 最大误差值/m | 最小误差值/m | 误差分布/(%) | 平均定位误差/m | ||
| ≤2 m | ≤3 m | ≤4 m | ||||
| 校正前 | 5.26 | 0 | 20.36 | 53.70 | 63.54 | 3.031 2 |
| 校正后 | 4.16 | 0 | 70.22 | 88.81 | 99.78 | 1.378 4 |
?
5 结 语
本文以智能手机为定位终端,通过优化步态检测算法、匹配地下空间路径特征角度,有效地实现了任意姿态下的步态检测与误差累积量消除。与传统惯性传感器定位算法相比,其不需要额外硬件设备进行定位坐标校正,能够持续稳定地提供较为精确的位置信息,且不受电磁信号干扰,校正后平均定位误差小于2 m,方便人们在地下空间的活动。
1
