Melexis触觉传感器可测量3D力矢量,赋予机器人强大的触觉能力
据麦姆斯咨询报道,近日,迈来芯(Melexis)完成了一项触觉传感器的重大创新,推出了Tactaxis产品原型,以提升机器人与易碎或多样化物体的交互能力。Melexis的Tactaxis产品原型是一款完全集成化的触觉传感器,结构紧凑且柔软,可提供作用于其表面的3D力矢量数据。这项创新改善了机器人手和抓具的能力,使得像摘水果这样的精细操作成为可能。
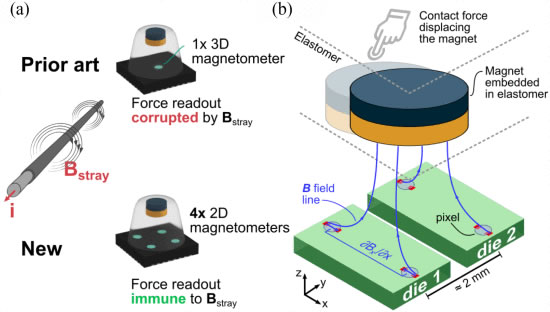
这款开创性的Tactaxis触觉传感器产品原型采用了Melexis经过业界验证的Triaxis?技术,具有多个3D磁力计像素(magnetometer pixels)。该传感器配有一块嵌入到弹性材料中的磁体,这样构成一个柔性接触界面,可模拟人体皮肤的属性。由于该传感器具有高灵敏度的特性,因此即使检测到很小的力也会产生相应的信号响应,其能够实现的力分辨率为2.7mN,足以辨识不足1克(约0.3克)的重量变化。
多像素磁力传感器概念
Tactaxis触觉传感器产品原型非常紧凑,其基于尺寸为5mm x 5mm的四像素磁力计阵列(核心是Melexis基于Triaxis技术的磁传感器)及直径为6mm的弹性体块(内嵌磁体)构建而成,因此适用于狭小空间的应用。
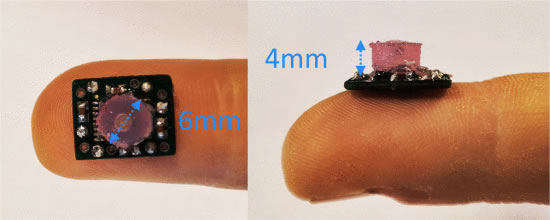
Tactaxis触觉传感器产品原型

Tactaxis触觉传感器概念图
不过,Melexis将面临来自Meta(前身是Facebook)等公司的竞争。Meta于2021年11月发布了其触觉传感器DIGIT,力求让机器人达成感知、推理、计划和行动的完整循环,然后从环境中获得反馈。DIGIT是一种低成本、紧凑的高分辨率触觉传感器,与通常依赖电容或电阻方法的传统触觉传感器不同,DIGIT实际上基于视觉技术。

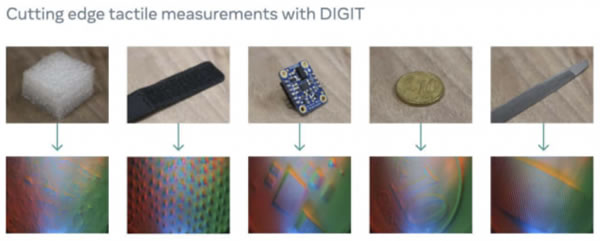
Meta触觉传感器DIGIT
Tactaxis采用的梯度测量方法能够使传感器不受杂散磁场干扰,这样可以防止潜在的测量错误,它也足够坚固耐用,以应对恶劣的条件(如温度变化等)。与DIGIT基于光学技术的触觉传感器不同,Tactaxis是可以大批量生产工厂校准的集成式传感器,这种半导体工艺能够带来巨大的成本和可靠性优势。
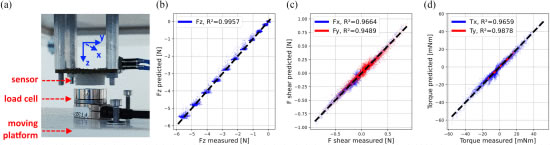
Tactaxis触觉传感器校准设置
“机器人需要触觉技术来操作易碎的物体。针对此类应用,我们开发了一种新型磁传感器来准确测量接触力,同时对干扰也具有很高的鲁棒性。”Melexis全球创新经理Gael Close解释说,“通过开发Triaxis?磁传感器技术的强大功能,Melexis在机器人触觉传感器方面迈出了重要一步,提供了坚固耐用且具有竞争力的多轴力传感解决方案。我们现在将使用Tactaxis产品原型作为未来研发工作的基础。”
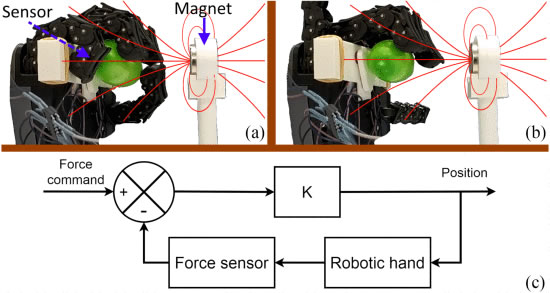
演示杂散磁场对具有力传感器反馈的机械手的影响。在上图配置中,力传感器处的杂散场约为3mT。(a) 多像素力传感器避免了来自附近磁铁的杂散场干扰,并且力得到很好的调节,从而保证手以适当的力量握住气球。(b) 相反,传统单像素力传感器已经损坏:手错误地释放了气球。(c) 闭环控制算法框图。
电气和电子工程师协会(IEEE)于2022年1月发布了一份白皮书,详细介绍了Melexis的3D磁力传感器产品原型——“A Gradiometric Magnetic Force Sensor Immune to Stray Magnetic Fields for Robotic Hands and Grippers”白皮书下载地址:https://ieeexplore.ieee.org/document/9695271。
延伸阅读:
《触觉技术及市场-2021版》
《印刷和柔性传感器技术及市场-2021版》
《可穿戴传感器技术及市场-2020版》
相关热词搜索:触觉传感器 力传感器 磁传感器 磁力计
延伸阅读:
- ·2011年硅基磁传感器收入将增长24%(2011-09-15)
