超高分辨率毫米波成像雷达感知功能助推完成终极安全驾驶体验
传统的毫米波雷达计算能力和内存大小限制了传感器同时跟踪多个目标的能力。虽然成像高分辨率雷达可以解决传统毫米波雷达的一些弱点,但任何传感器都有其自身的优缺点。事实上,这些主要得益于成像毫米波雷达角度分辨率的提高,这大大提高了汽车自由行驶区域的地图。
近年来,自动驾驶技术一直在发展,人们一直在谈论什么时候才能真正实现汽车的全自动驾驶。今天,事实是,全自动驾驶汽车仍然没有出现,但技术进步也让人们期待它。与此同时,许多相关的负面报道也源源不断地涌现出来。自动驾驶汽车仍然存在重大的感知问题,其感知和理解周围环境的能力仍然缺乏,这也是造成许多自动驾驶汽车事故的主要原因。
缺乏感知的问题在哪里?
只要问题出在我们常说的传感器身上,感知能力的缺失。
让我们从相机开始。这种传感器不仅在特殊工作条件下会出现问题,而且在日常生活中也会出现问题。相机的感知水平在很大程度上受到天气和光照条件的限制,存在失明的风险。就其感知能力而言,其感知范围有限。它无法测量速度,对周围环境缺乏深度感知。
由于摄像机有这样的限制,雷达是自动驾驶汽车的更好选择,现有的传统毫米波雷达也有潜在的危险,特别是对于L2+级和NCAP安全性,现有的毫米波雷达仍然不够先进。首先,分辨率非常有限。这里指的是角度分辨率。高程分辨率不足会导致雷达忽略静态物体,无法实现感知和自由空间映射(驾驶区域)。如果没有俯仰分辨率,则无法测量高度。此外,传统的毫米波雷达计算能力和内存大小限制了传感器同时跟踪多个目标的能力。误报还增加了现有毫米波雷达的不可靠性。
要解决自动驾驶汽车感知不足的问题,传感器,特别是A3908EEETR-T毫米波雷达传感器的升级迫在眉睫。
成像雷达解决传统雷达缺陷
与传统雷达不同,成像雷达需要具备以下特点。首先,它需要能够映射环境,实现感知和自由空间映射,避免运动和静态障碍;其次,我们应该能够更有效地消除误报,解决鬼刹问题;最后,当然,更高的灵敏度和分辨率。
虽然成像高分辨率雷达可以解决传统毫米波雷达的一些弱点,但任何传感器都有其自身的优缺点。下图直观地显示了适用于所有使用场景的传感器组合的一些优缺点。在大多数应用中需要考虑的要点上,摄像机和成像雷达可以更好地覆盖。
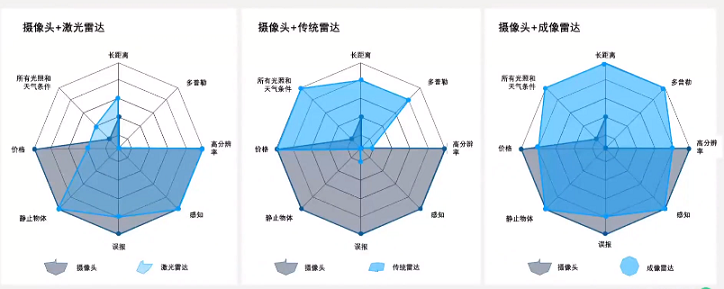
图:优劣势对比,Arbe。
成像毫米波雷达在高分辨率、全面感知和误报方面明显超过传统毫米波雷达。事实上,这些主要得益于成像毫米波雷达角度分辨率的提高,这大大提高了汽车自由行驶区域的地图。
如何实现雷达革命?
从上面的比较中,我们可以定义成像雷达——一个清晰的图像,一个毫米波雷达,支持高度和自由空间映射。实现这一目标的方法是拥有大量的天线通道。天线通道的增加大大提高了设备的空间采样能力。
实现方法看起来并不复杂,但并不容易实现。传统的毫米波雷达有12个虚拟通道,其次是192个通道,由4个片级组成。以Arbe的高分辨率成像雷达为例,该设备有2304个通道,并配备了大量通道的特殊射频芯片组。
随着通道数量的增加,感知能力无疑会提高,但处理能力能否跟上也是一个很大的挑战。一般需要使用FPGA来处理192个通道。当通道高达2304时,只有专用处理器才能加载这个级别的数据。
基于毫米波雷达的后处理算法的实现是另一个增强点。该算法包括自由空间映射、物体跟踪和SLAM能力。这些功能完全基于成像雷达本身,而不是与相机或其他传感器相结合。这是至关重要的,这意味着该算法属于超高分辨率雷达本身的能力。成像雷达可以在整体点云的基础上与后续摄像机感知集成前数据,也可以检测和跟踪每个传感器,然后进行前数据集成,然后从算法层理解场景。这种超高分辨率雷达可以实现自动运动检测,而不需要其他传感器来测量速度、角度和其他参数,也就是说,整个感知本身完成。
此外,值得一提的是,传统雷达很难检测水平运动。虽然雷达可以感知多普勒效应,但仍然很难准确感知。角度分辨率必须足够高,以便准确地感知水平运动。这也是成像雷达的优势所在。
小结
目前,成像雷达市场在自动驾驶汽车制造商、智能机器人和自动驾驶出租车领域取得了快速进展。根据Arbe的估计,该汽车制造商预计将在2025年左右批量生产一款全新的超高分辨率成像雷达车型;智能机器人,特别是在物流移动机器人领域,将在明年左右得到广泛应用。
