韩国机器人融合研究所研发钢丝绳和吊具轮检查机器人的技术

▲?绳索检查
韩国机器人融合研究所(总裁Jun-Goo Yeo)宣布,贸易、工业和能源部将开展“开发用于远程检查包括钢丝绳和滑轮在内的绳索设施的机器人系统”。
该项目得到产业通商资源部、庆尚北道、浦项市的支持,项目总费用为55亿韩元(工业部50亿,庆尚北道/浦项市5亿),为期4年,并将基于人工智能的成像和无损检测技术应用于钢丝绳和吊轮装置,因此,旨在开发基于远程主动控制的索道设施检测机器人系统,用于实时安全确认。
由于最近接连发生的安全事故,公众的安全意识不断提高,对社会设施的普遍担忧也在增加。
目前,索道设施的检查仅限于对检查员的目视检查和可达点的一般无损检查水平。此外,高强度的工作和工人的安全也因极端的工作环境(强风、大雨、寒潮等)而面临风险。需要建立对所使用的索道设施的管理制度。
韩国机器人融合研究所从大约一年前开始,在庆尚北道的抢先支持下,通过与韩国交通安全厅的现场调查,为开发索道设施检查机器人技术做准备,交通安全厅参与了这项研究。
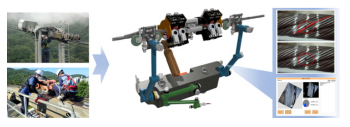
▲?缆车、升降设备等远程主动巡检机器人系统概念图
韩国机器人融合研究所通过产、学、研联合研发,开发了一种可以使用机器人技术监控钢丝绳和椽子内部/外部的系统,并使用先进的传感器进行远程监控,并且是唯一韩国有1个。与进行铁路(轨道)检查的专业机构韩国运输安全局的检查技术相结合,将验证和推广开发的技术,使其能够商业化。
韩国机器人融合研究所所长 Yeo Jun-koo 表示:“为了防止社会基础设施发生安全事故,有必要开发基于图像和 MRT 的无损检测模块技术,而不是肉眼。作为全球首次尝试开发用于铁路设施检查的钢丝绳驱动机器人技术,我希望所开发的技术能够应用于人类难以直接检查的基础设施,例如桥梁和电缆应用设施(港口起重机,建筑起重机等)我们很期待,我们会尽力研究,使其成为安全检查领域机器人检查系统的一个很好的例子。”
