实现最优解!分析智能叉车在不同场景下的触发应用

托盘是物品流通(物流)中最常用的容器,智能叉车为托盘搬运的智能化提供了最柔性化、最便捷的解决方案。所以智能叉车在部署过程中,如何快速适应托盘的状态就显得尤为重要,甚至可能决定项目的成败。
所谓触发就是在特定时间、特定地点以某种特定的方式呼叫智能叉车,并在叉车到达后,按照我们下达的指令完成既定动作。本文总结了几种智能叉车触发情况,供大家参考。

一、智能叉车与空托盘
当货物到达某特定地点后,首先要将货物从卡车上卸到托盘上完成码垛。因此这里需要的就是空托盘。智能叉车的触发形式与空托盘的摆放初始状态息息相关,按托盘初始状态,叉车触发状态总结以下几种情况:
1.?平铺式摆放的触发
1)?人工摆放
初始形态:托盘由人工摆放至特定位置处;
触发方式:a)?如托盘有定位工装,则可在指定位置上安装到位传感器,空托盘放入指定位置后,传感器感应托盘到位,给智能叉车调度系统发送触发指令;
该方式的优点整个过程中人是无感的,且触发信号具有唯一性,可为叉车调度系统提供精确位置信息,但该方式应该尽可能选择合理传感器,避免误触发。
安装定位工装会破坏场地现有物理环境,导致该托盘位始终处于占据状态,因此要合理考虑是否设置这样的专用托盘位。
b)?如无法安装定位工装,则托盘无法完成严格意义上的定位,因此建议使用智能叉车的人工叉取模式,即在该托盘位附近设置智能叉车停靠点,如叉车无任务就会到该停靠点等待,人工放置完托盘后,由人工开叉车完成叉取后切换自动模式。亦可在高处安装摄像头使用机器视觉进行判断托盘有无,如判断该处有托盘则给智能叉车发送触发指令。
该方式的优点是不破坏现场物理环境,但需要人工操作叉车,对工人的依赖较大。虽然可以使用机器视觉对该方案加以改进,但安装摄像头对库位进行识别,就势必是要使用自动叉取的模式,这样对该机器视觉系统的识别精度的要求也会提高,会造成成本的增加,且在人机混场的模式下,相机会经常被人遮挡,甚至是因为现场光源或其他问题,发生误识别等。因此在选择该应用场景时,应结合场地情况、成本因素和成功率等进行综合分析。
这种人工摆放的方式通常会直接应用于卸车位,即人工将空托盘码放完成,并直接码垛,码垛完成后再给叉车发送触发指令(下文有描述)。而上文描述的情形通常会发生在循环周转场景中的第一次摆放托盘的情况。
2)?循环周转
初始形态:循环周转通常是设定一个专门的空托盘缓存位,托盘由自动叉车送入,叉车调度系统具有储位管理功能,可实时更新储位状态。
触发方式:当叉车将空托盘送入指定区域后,系统中的储位状态即更新为有托盘的状态,如实际业务中需要空托盘,则调度系统直接调度叉车到相应储位叉取空托盘即可。

这种方式不需要任何的物理限位和传感器,可实现该流程的无人化,在规划时应合理考虑空托盘的周转效率和叉车的综合使用效率。
2.?堆垛式摆放的触发
1)?人工摆放
初始形态:第一个空托盘由人工先进行放置,然后在初始位置上进行码放,川字底托盘通常是一正一反交替码放,其他类型托盘都是正面朝上堆叠放置。
触发方式:人工码放通常是最下面的这里面也可以分为有定位工装和无定位工装的情况,触发方式参见第1小节。

2)?自动堆放
初始形态:自动堆放最常用的设备是托盘码垛机,托盘码垛机形式多样,可作为单体设备使用,也可与输送线等自动化设备配合使用。
触发方式:当业务开始需要空托盘时,设备管理系统会给托盘码垛机下发释放托盘任务,该设备将最下层托盘放置于地上,并通知系统托盘放置完成,然后系统调度智能叉车到达该托盘码垛机最下方叉取已经释放的托盘,并送至相应位置即可。
如业务完成后产生了空托盘,也可以由智能叉车将空托盘送至托盘码垛机最下方,并通知系统放置完成,此时系统控制托盘码垛机自动将空托盘堆叠。实现空托盘的自动周转。
托盘码垛机通过立体的方式解决了水平放置占用空间的问题,但必须要求现场托盘规格统一。且增加托盘码垛机也会增加成本,增加控制系统难度,在做规划时应综合考虑成本、效率和成功率等因素。

3.?储位摆放的触发
在某些自动化程度较高的仓库中,如立体仓库等,通常空托盘是在储位中缓存的,因此当有业务需要的时候,托盘是要从自动化设备中输送出来,也就是智能叉车与托盘输送线进行对接。
空托盘从输送线上依次输出,而输送线上会安装到位传感器,因此当托盘到位后,会给系统发送叉车触发指令。
二、智能叉车与满托盘
当空托盘到位后,就需要对空托盘进行码垛,按码垛方式大致可分为以下几种情况:
1.?人工码垛
空托盘由自动叉车送入指定位置后(或工人直接摆放到指定位置,摆放后需要将托盘与位置进行绑定),工人开始对空托盘进行码垛,码垛过程中要对包裹或SKU与托盘进行绑定(便于库存管理及物品追溯),码垛完成后工人需要按下人机交互按钮(可以是物理按钮,也可以是智能终端屏幕按键),完成对叉车的触发。

2.?自动码垛
当空托盘运送至自动码垛工位后,由自动码垛设备完成码垛作业后,将完成信息上报至业务系统,由业务系统对叉车调度系统下发叉车调度任务,从而触发叉车作业。
总之,智能叉车动作的前提是接收到明确的任务开始指令,而该指令一定是要前道工序就位后方可下发。各种触发方式应该在方案中综合考量,实现整体方案的最优化。

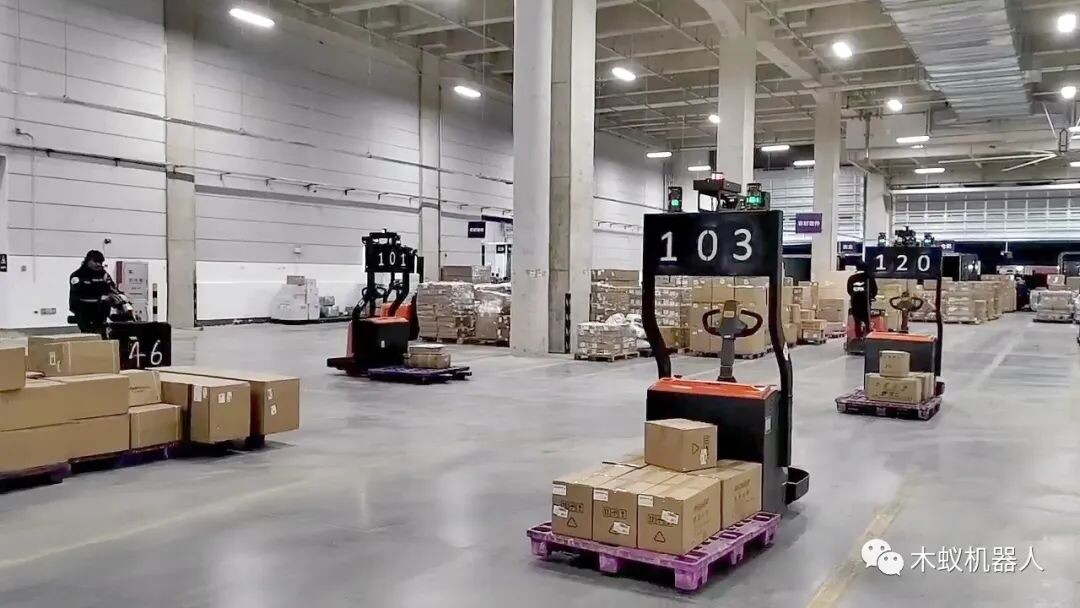
以上触发方式根据客户现场情况的差异,结合不同的搬运解决方案,目前均已应用于木蚁诸多客户的各个外场。
凭借在物流仓储领域深耕多年的经验,木蚁机器人拥有自主研发的产品核心优势以及差异化的应用场景,始终坚持用最优质的方案打动客户,目前木蚁机器人推出的室内室外搬运解决方案已获得德邦、安能、跨越、壹米滴答等物流快运领域头部企业的认可。
木蚁始终坚持用最优质的方案打动客户,在未来,也将继续探索和打磨,沿着无人驾驶和群体智能的技术路线,打造更多物流快运领域柔性搬运解决方案,助力行业智慧化发展。
关于上海木蚁机器人科技有限公司进入企业商铺
上海木蚁机器人科技有限公司(Mooe Robot)位于上海张江高科技园区,专注于无人驾驶搬运机器人和应用方案的研发、设计、生产及销售,打造智能制造行业无人搬运机器人。
木蚁核心成员是国内从事自主定位导航机器人的算法研发和产品化团队,均有十年产品经验,曾成功开发航空八院月球车视觉导航项目开发,军用排爆机器人,模块化工业手臂等前沿科技产品,荣获RoboCup机器人足球世界杯中国区冠军等。凭借是机器人领域十多年的积累,木蚁机器人在自主导航、高精度地图构建、多传感器融合、人机交互、多机器人调度、工业级闭环应用方案等形成技术壁垒,以高度灵活性和高精度末端定位的产品特色,目前拥有国内外3C电子行业的物料运送的大量成功应用案例。
Mooe Robot是智能搬运机器人领域的领先制造商,致力于开发易于操作、使用灵活且安全的机器人,以帮助用户提高工作效率。Mooe robot 公司发展迅速,从位于上海的总部开始,目前产品已经在德国、新加坡、香港等全球多个发达地区客户现场投入使用,并已建立全球经销商合作网点,而且还在不断增长中,我们正在向全球的客户推广Mooe Robot的机器人产品。
