欧空局:宇航员在太空中控制陆地上的机器人

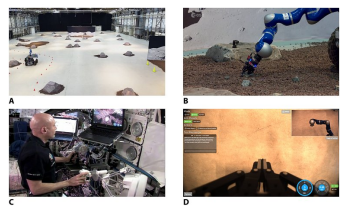
这是Analog-1交互式机器人,模仿太空机器人。[图片:欧空局]
从太空控制机器人
国际空间站上的一名宇航员在安装在德国的模拟太空探索环境中实时控制机器人。该技术旨在让轨道宇航员控制探索外星表面的漫游车,由欧洲航天局 (ESA) 和德国航空航天中心 (DLR) 的一个研究小组开发,学术界和工业界的合作伙伴也参与其中。在这个基于地面的漫游者控制会话中达到高潮。
机器人已被证明是探索月球和火星的基本要素,但由于通信延迟问题,从地球上的控制中心直接控制它们直到现在是不可能的,即命令传送到地球所需的时间机器人,检查发生了什么并返回结果 - 如果您将机器人转向错误的方向,可能没有时间修复错误。
更合理的情况是,宇航员呆在围绕正在探索的天体运行的航天器中,并实时控制已经着陆的机器人。这不仅降低了机组人员的风险,还使得研究宇航员无法着陆的天体成为可能。
从太空控制机器人的努力始于近十年前。最近一次测试活动的结果始于 2019 年,现已在《科学机器人》杂志上发表的一篇文章中公布。
最后,团队实现了一定程度的实际控制。
控制算法处理通信延迟,防止机器人发生事故。
延时机器人控制
历时两小时的主要天地测试成功克服了平均0.8秒的通信信号双向延迟,数据丢包率约1%。
“我们在 DLR 的团队必须设计一种控制算法,尽管有这个时间延迟,它仍然可以稳定工作。由于操作员收到的力反馈存在延迟,即使在撞到石头后他也可以继续移动机器人。这可以导致机器人与其控制器不同步,可能会像疯了一样振动,甚至可能会损坏自己。为了防止这种情况发生,我们使用了一个名为‘被动’的概念——我们查看操作员投入的总能量,在远程端,我们确保机器人不会提供比这更多的能量,反之亦然。因此,例如,当机械臂在移动时突然撞到一块岩石,它需要额外的能量才能让它移动,而这是宇航员没有命令的,所以我们一次性降低命令能量以减慢速度。 , 在 850 微秒延迟之后, 当宇航员感觉到岩石时, 他可以选择添加额外的能量来推动它。这种“时域被动方法高延迟”技术在实践中非常直观, 应该可以在较高的延迟时间下很好地工作也一样。”DLR 项目负责人 Aaron Pereira 解释说。
随着控制算法被证明有效,该团队现在打算让测试更加真实,离开实验室环境并带着机器人探索意大利埃特纳火山的火山斜坡。
