Aeva和NASA想用激光雷达驱动的KNaCK背包来绘制月球地图
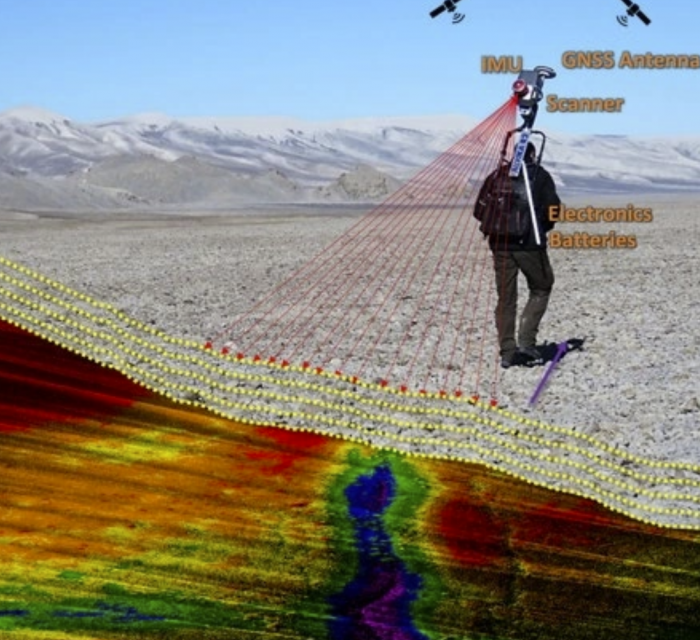
该项目被称为KNaCK,即运动学导航和制图Knapsack,它的目的是作为一种基于同步定位和制图(SLAM)概念的超精确测距系统。目前而言,我们在月球、火星或任何其他星球上都没有GPS类型的技术,尽管我们有来自轨道的高分辨率表面图像,但这并不总是足够用来导航的。
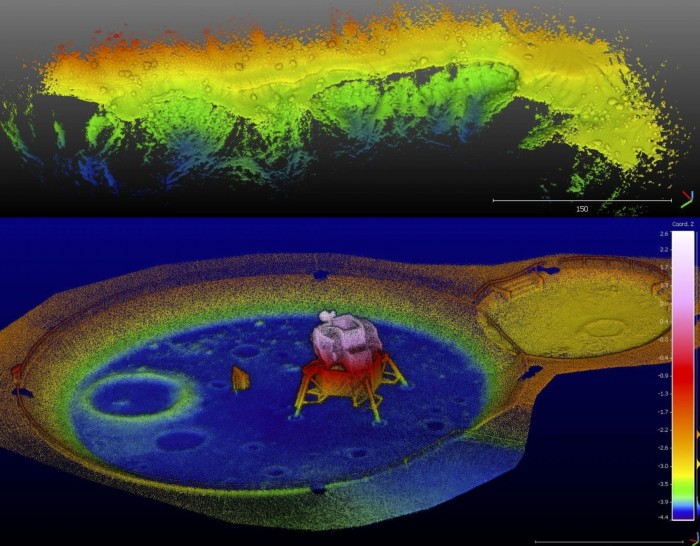
例如,在月球的南极,太阳的固定角度导致那里有永远不会被照亮的深深的阴影,以及你需要小心观察的明亮亮点。由于地表下有大量的水,这一地区是月球行动的目标,但我们对地表的详细情况没有了解。
激光雷达提供了一种即使在黑暗或明亮的阳光下也能进行测绘的选择,而且它已经被用于着陆器和其他用于此目的的仪器。然而,NASA正在寻找的是一个足够小的装置,可以安装在宇航员的背包上或漫游车上,但能够扫描地形并实时产生一个详细的地图,并确定它在其中的确切位置。
与许多此类系统相比,Aeva公司的优势在于,其激光雷达除了捕捉某个特定点的范围外,还将捕捉其速度矢量。因此,当它扫描一条街道时,它知道一个形状正以30英里/小时的速度向它移动,而另一个形状正以5英里/小时的速度向它移动,还有一些形状相对于传感器本身的移动来说是静止的。这一点,以及它使用频率调制的连续波技术,而不是闪光或其他激光雷达方法,意味着它对明亮阳光的抗干扰很强。
Aeva公司把所有的元素都打包到宇航员背包当中的小金盒里,这意味着系统不容易因为大气条件的变化而发生变化。盒子是永久密封的,这使得该硬件可以适用于空间应用以及地面应用。
