矩课堂 | 机器视觉定位检测及案例分析:如何实现快速准确的定位?
物体检测的任务是找出图像或视频中的感兴趣物体,同时检测出它们的位置和大小,这是机器视觉领域的核心问题之一。
随着工业自动化的蓬勃发展,很多制造商在产品的生产过程中,总会出现一些瑕疵,不良,畸形,贴合偏差等。有时人工无法达到要求的精度时,运用机器视觉系统的定位/对准/对位,能顺利完成高精度的制造工序。但是,在物体检测过程中也有很多不确定因素,如图像中物体数量不确定,物体有不同的外观、形状、姿态,加之物体成像时会有光照、遮挡等因素的干扰,导致检测算法有一定的难度。检测如果存在精度问题,就会导致不良品的产生,检测及控制一旦存在时滞,也就会降低生产性。如何实现快速准确定位,成为生产工序高效化不可或缺的手段。矩视智能低代码平台融合深度学习算法,2D/3D视觉,SaaS工具和aPaaS模块化组件。完成图像采集、图像标注、算法开发、算法封装、应用集成的完整开发工具链,无需编程,支持深度学习模型训练闭环,将开发效率提升10倍以上,颠覆了传统的项目定制开发模式,满足不同业务场景下的差异化需求,助力产业智能化升级。
目标定位模块概述
主要用于对图片中不同类别、位置的对象进行定位和分类,以及对图片中不同缺陷特征的定位和检测。常用于对多种工件进行分类、定位、计数,对同一工件中多种缺陷特征定位、分类等,是应用最广泛的缺陷检测工具。特点:? 训练速度和推理速度快,经过深度学习训练,可解决平移、旋转、缩放和光线等影响。? 支持图像中多个目标同时检测,给出所有被识别目标的位置和定义? 标注工具矩形图形式,灵活、便捷。应用场景:? 不规则形状目标检测? 小目标检测
案例解析:连接器缺陷检测
● 检测需求
对连接器表面缺陷进行检测,Pin针数量分布25×2,需要检测Pin针有无偏斜、变形。
●检测难点
Pin针数量多、缺陷形态多变、检测区域背景复杂。
●解决方案
利用矩视智能的目标定位功能,构建基于深度学习的连接器缺陷识别模型,提供非接触式检测,精确地呈现连接器Pin针的变形、偏斜等重要信息,及时发现连接器缺陷,有效剔除不合格产品。
●具体步骤
1. 创建“目标定位”项目
2. 上传图片
根据上传图片,对给出缺陷进行了归纳分类并打标签处理,针对不同的缺陷类别检测需求给出了相应的AI处理方案;
3.?标注
使用标注工具,将缺陷类型根据标签进行标注;

4. 模型训练
使用矩视智能低代码平台中【训练】和【测试】功能模块,进入深度学习阶段,实现检测需求。
5. 模型验证
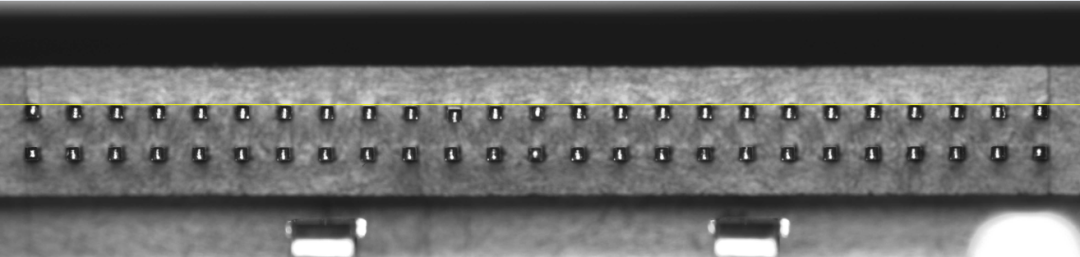
01
使用前VS使用后
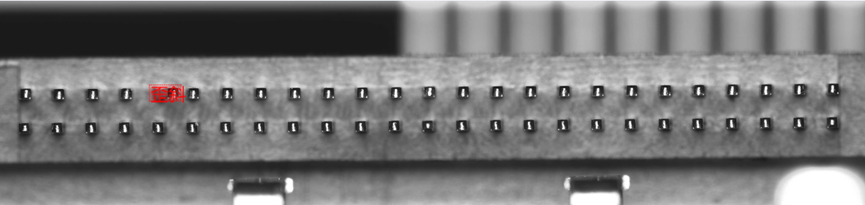
第1排第5个向右偏斜
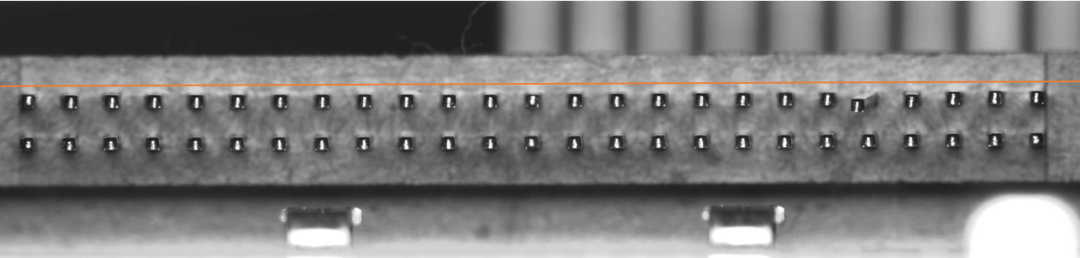
02
使用前VS使用后

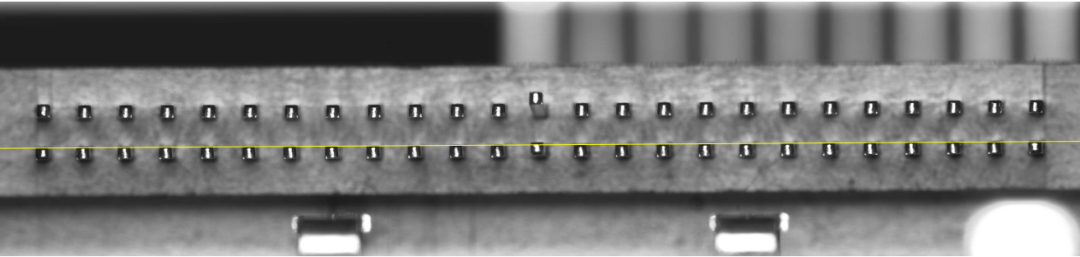
第1排第11个向下轻微偏斜
03
使用前VS使用后
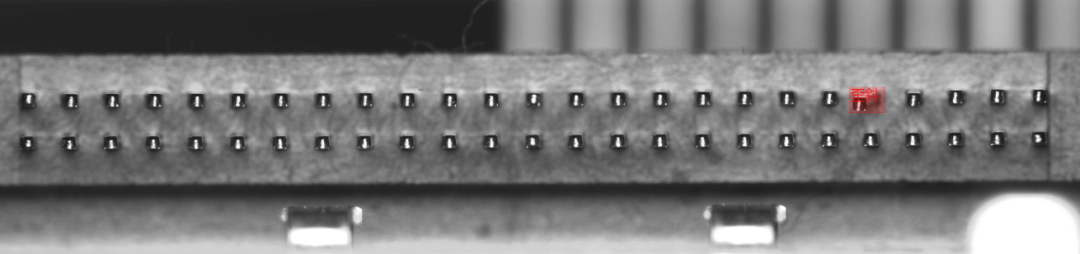
第1排右数第5个向左下方偏斜
04
使用前VS使用后
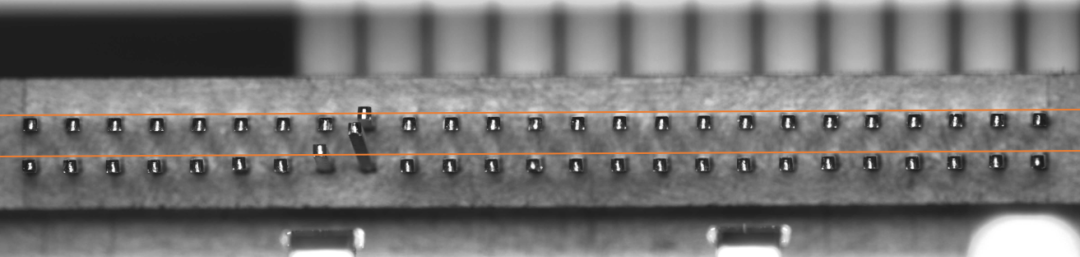
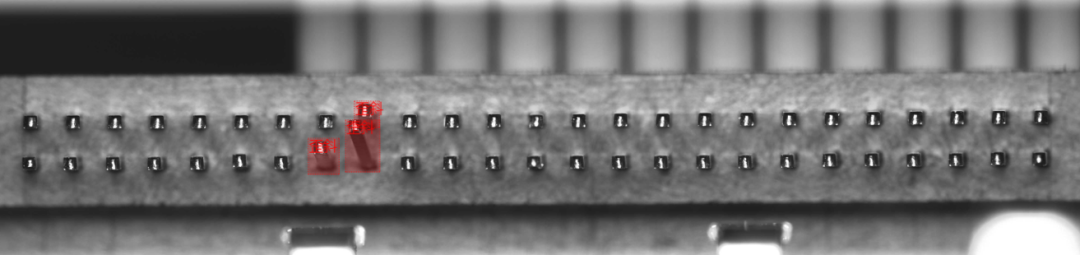
第1排第9个向上偏斜第2排第8、9个向上偏斜
05
使用前VS使用后

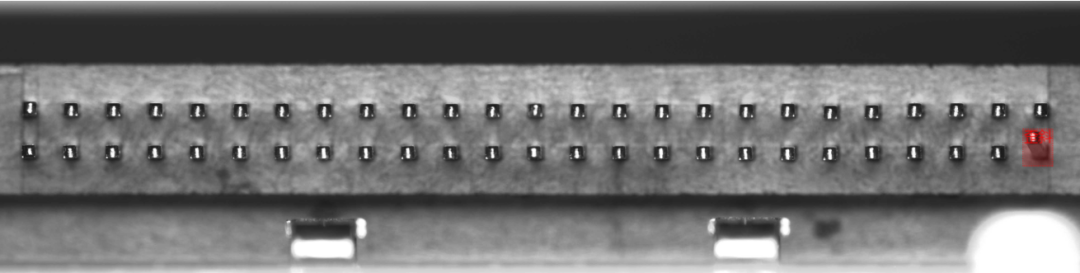
第2排倒数第1个向左上方偏斜
06
使用前VS使用后
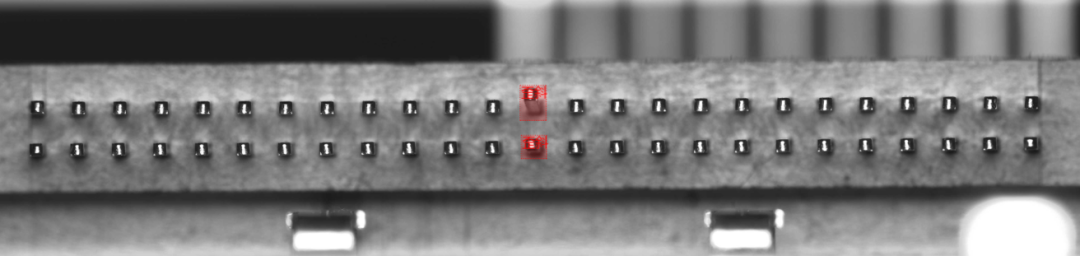
第1排第13个向上方偏斜第2排第13个向上方偏斜
●最终效果使用矩视智能低代码平台之前缺陷识别率低,容易误识别。使用矩视智能低代码平台目标定位算法测试后达到了技术要求,缺陷检出率和准确率都能达到99%以上。在连接器应用中,矩视智能使用Ai深度学习算法,有效解决大部分缺陷检测需求,缓解人工质检存在的种种问题,为客户提高产品质检效能,得到了客户极大认可。
