Advanced Navigation开发Hydrus:AUV的更小、更便宜的替代方案
大多数AUV是鱼雷形机器人船只,可以自主地在海底世界探索数天,利用一套传感器来记录视频和其他形式的数据。它们通常大到必须使用相对较大的水面船只上的起重机来发射和回收。
租用或购买这样一艘船--连同支付船员的费用--可能相当昂贵。此外,根据不同的品牌和型号,AUVs本身可能需要花费几百万美元。这就是Hydrus的设计目的所在。
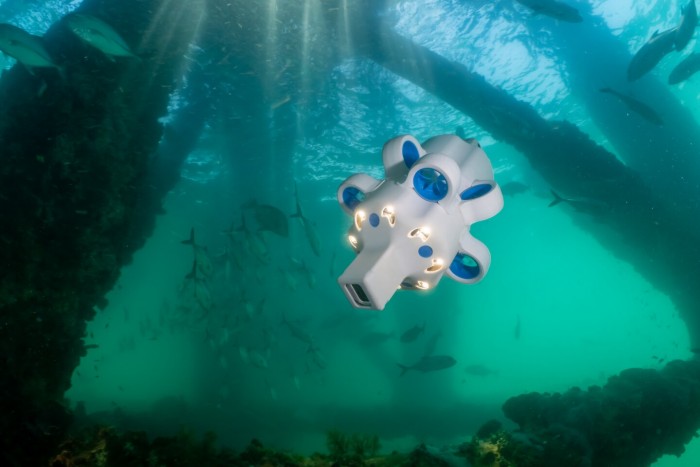
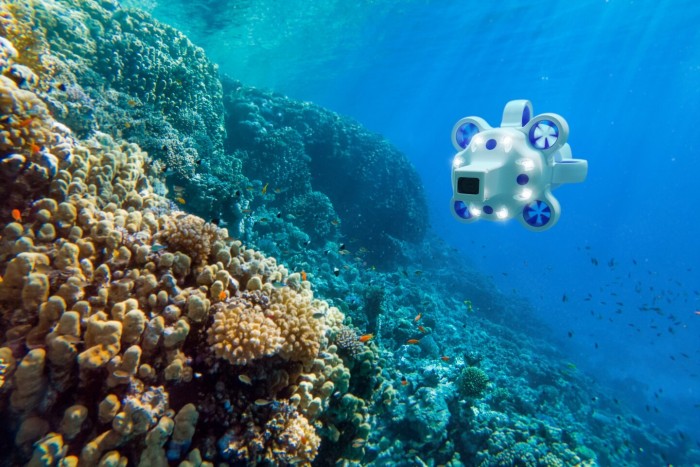
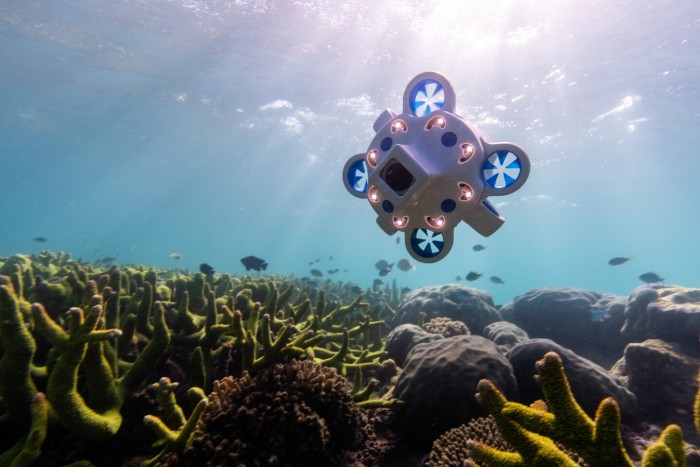
它由澳大利亚公司Advanced Navigation制造,尺寸仅为470×260×260毫米(18.5×10.2×10.2英寸),重6.7公斤(14.8磅),售价约为5万美元。它的小尺寸意味着它可以作为行李携带到商业客机上,并由一个人从小船上部署。
利用七个无轮毂电动推进器,它的最高速度为4节(7公里/小时),最大下潜深度为3000米,从其发射点出发可行驶9公里。它的锂电池充一次电应该可以运行大约三个小时。它的摄像头可以拍摄4K/60fps的视频,由8个LED聚光灯辅助,亮度可达20000流明。
用户首先为Hydrus设定一个路线,让其跟随。AUV将通过几种技术来跟踪它在该路线上的位置。
首先,当Hydrus仍在水面上并能够访问GPS卫星时,它记下了其发射点的GPS坐标。一旦潜入水中,它就会使用机载加速度计和陀螺仪来跟踪它离开该地点的速度和方向。在这方面,AUV得到了声纳系统的帮助,它利用声纳来监测它在海床上行驶的速度和方向。
此外,Hydrus使用所谓的超短基线(USBL)定位系统。在这种设置中,水面舰艇上的水下声学传感器在水中发出声学“ping”,AUV接收并使用自己的转发器ping/replies。通过分析从第一次发送ping到收到回复ping之间所经过的时间,以及回复的方向,就可以确定Hydrus目前的位置。该数据在随后的ping中被送回AUV,使其能够知道它相对于其路线上预设的航点的位置。

应该注意的是,虽然USBL系统可用于在必要时改变Hydrus的路线,但其不能实时远程驾驶。视频和其他数据--包括水的导电性、温度和深度--被记录在机载硬盘上,以便任务后检索。也就是说,Hydrus还可以使用一个集成的光学调制解调器,以快速光脉冲的形式,通过水将实时数据传输给其主机上的接收器--这种类型的通信的最大范围大约是10米。
Hydrus的可能应用包括生态调查、海底三维测绘(通过声纳系统),以及水产养殖设施和海上风电场的水下检查。
Advanced Navigations公司的海底产品经理Peter Baker表示:“事实上,它有声学,有摄像头,有惯性测量单元,有飞行安全电池......所有这些技术都是一个非常大的成就。它拥有你期望在一个更大、更复杂的系统中的所有技术。”
Hydrus预计将在今年第四季度前投入商业使用。
