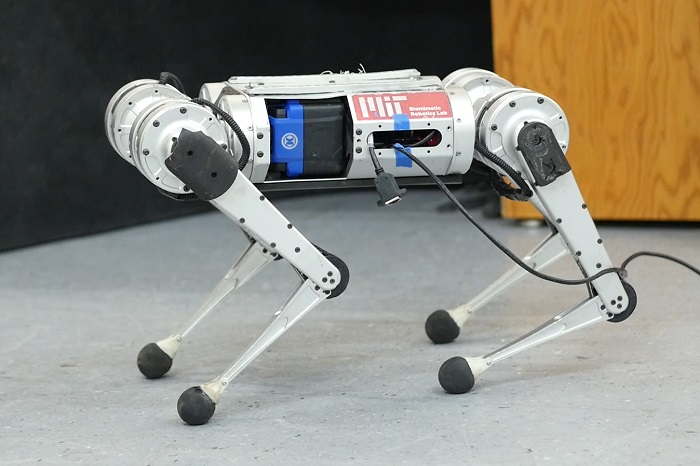
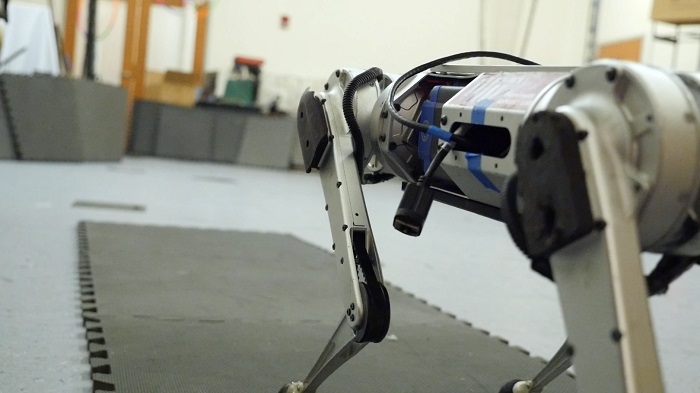
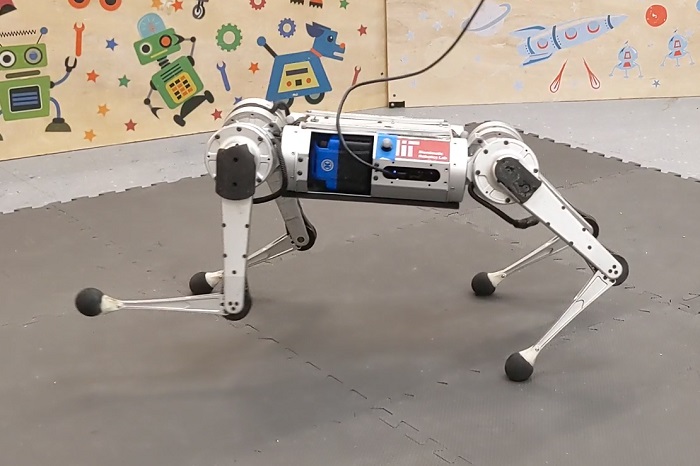
MIT研究团队让四足迷你猎豹机器人学会了如何快速奔跑
(来自:MIT / CSAIL)
虽然迷你猎豹算不上是当今最快的四足机器人,但麻省理工学院的 Improbable AI 实验室和美国国家科学基金会(NSF)旗下的人工智能与基础交互研究所(IAIFI),还是赋予了其更强的灵活性。
Mini Cheetah robot runs faster than ever - MIT CSAIL(via)
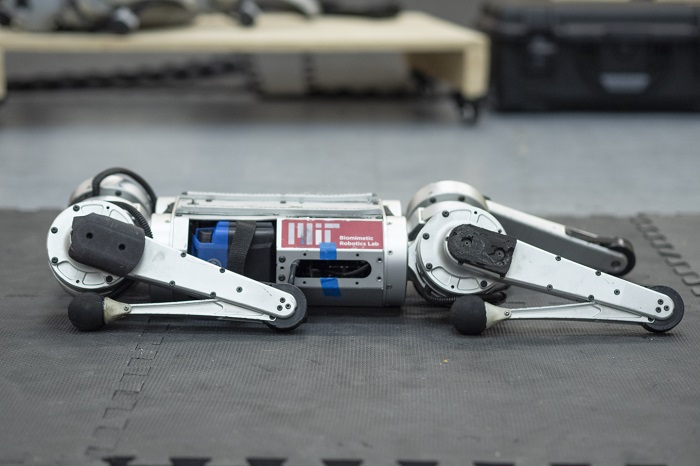
在近日分享的一段新视频中,可见到这台机器人在撞到障碍物后迅速绕过,以及自主学习适应湿滑结冰路面、以及松散的砾石山丘等地形。在一套简单的神经网络的加持下,它能够对错综复杂的新环境展开相应的评估。

通常情况下,机器人都是在一套系统的指引下移动的。该系统会参考机械肢体是如何移动的,来分析并制作指导用的模型数据。但在实际应用中,这些模型往往效率低下、且在应对意外状况时不够全能。
尤其当机器人已最高速度运行时,系统硬件更是面临极限压力,使得环境建模变得更加困难。为了克服这方面的短板,MIT 研究团队选择了一套独特的“经验学习”系统。
相比之下,类似波士顿动力公司的 Spot 之类的机器人,依赖于人工去分析运动的物理特性、并手动配置机器人的软硬件和分析设计参数。
基于此,MIT 的迷你猎豹机器人可以通过反复试验来自主学习,而无需人工介入。在积攒了对不同地形的足够经验后,它便可在后续工作中自动改进其行为,甚至无需在现实生活中积累这方面的经验。
研究人员称,通过模拟,迷你猎豹机器人可在静止不动的三个小时内,迅速积累 100 天的经验。MIT博士生 Gabriel Margolis 与 IAIFI 博士后研究员 Ge Yang 补充道:
我们开发的这种方法,可通过模拟经验来改进机器人的行为,同时适用于在现实世界中成功落实这种学习行为。
背后原理是机器人能够在模拟器中看到所有环境信息,且系统会教授它们在可现实世界中分辨并识别的实用技能。
有了这样一套系统,研究人员还希望继续扩大技术的规模,且这是传统方法难以轻易做到的。

最后,Margolis 和 Yang 补充道:
想要构建具备多种不同技能的机器人,一种更加实用的犯法,就是告诉机器人该做什么、以及学会如何去做。我们的系统,就是一个很好的例子。
在实验室中,我们已开始将相关范例应用于其它机器人系统,包括可以拾取并操纵不同物体的机械臂。
