Meta靠边站,自供电柔性传感器,这才是元宇宙最完美基石!
关注传感器专家网公众号,获取传感器热点资讯、知识文档、深度观察

元宇宙目前对我们来说还是一个带有科幻色彩的产业,虽然Meta(前Facebook公司)、谷歌、苹果等科技巨头都纷纷宣布了自己的元宇宙战略,但这对于我们还是比较遥远。
为了真正实现元宇宙的感知和体验,以柔性传感器为关键技术的“电子皮肤”被列为了热点研究技术。本文来自生物基材料与绿色造纸国家重点实验室,介绍了更完美的柔性传感器——自供电柔性传感器,这才是“电子皮肤”的终极形态!
来看看这种让科幻成为现实的自供电柔性传感器的最前沿进展。
传感器是将外界信号转化为电信号等人类可利用信息的设备,在现今智能化信息 时代尤为重要。
目前市面上的传感器多由金属导体或半导体构成,它们广泛应用于各类电子器件之中。但是由于其大的质量和刚性,使其无法应对复杂的接触面,因而限制了其在轻量化、 便携化等场景中的应用。
另外,传感器都普遍面临着循环充电、定期维护和电池更换等供电问题,极大限制了传感设备的应用。为了解决上述问题, 开发兼具柔性及自供电功能的传感器成为传感器研究领域的热点。
本文综述了近年来国内外柔性自供电传感领域的发展现状和最新研究进展。分别阐述了压电、 摩擦电、 热电等自供电传感器的工作原理。
总结了柔性自供电传感器中常用的基底材料、 传感材料和电极材料发展概况,并概述其在电子皮肤、 可穿戴电子设备、 环境监测和智能体育等领域的最新应用。
一、 柔性自供电传感器供电原理
对于柔性自供电传感器而言, 目前主流的自供电方式为压电、 摩擦电和热电三种。另外,还有基于光伏效应等机理的传感设备。
其中,压电领域的研究开展最早,在材料、 性能和器件等方面取得诸多研究成果; 摩擦电作为新兴的能源供给研究领域,近年来引起国内外广泛关注,其相关研究和应用得到迅速发展;热电领域的研究在热能转换方面备受关注,且能实现温度监控,未来集成式可实现多信号检测的自供电传感器将成为研究重点。
1.1 压电型自供电原理
压电型柔性自供电传感器主要是由材料存在的电偶极矩产生压电效应实现信号传感。电偶极矩是通过取向的非中心对称晶体结构变形或由孔中存在持续电荷的多孔驻极体所获得的。
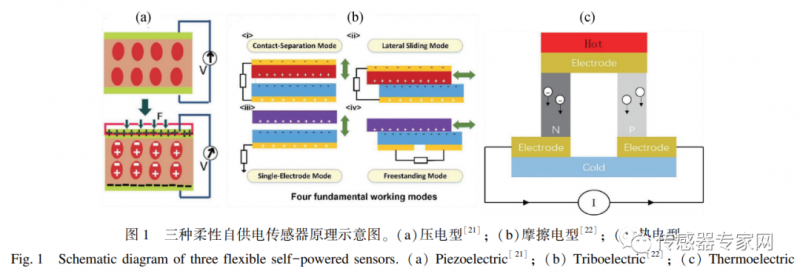
压电材料的性能主要用压电系数进行衡量,压电系数越高表明压电材料的能量转换效率越高。如图 1(a)所示, 当压电型柔性自供电传感器受到外界应力刺激时, 内部因外界压力会发生相应的形变过程, 并发生极化现象从而产生电信号。
压电型柔性自供电传感器的基本结构为三层, 即上下电极层以及中间的压电材料层。压电型柔性自供电传感器通常具有高灵敏度、 响应速度快、 能耗低等优点 。
但是受材料影响, 通常使用含铅的金属化 合物以及有机铁电材料等金属化合物, 故其生物兼容性较差。此类传感器只能用于检测动态压力信号, 不能检测静态压力, 因此其应用范围具有较大的局限性。
1.2 摩擦电型自供电原理
摩擦电型柔性自供电传感器主要是利用设备的摩擦层受外界刺激后发生接触, 使得两种摩擦材料表面产生静电荷, 从而导致相应的电压变化而实现传感。具体而言, 当受到外界刺激后, 材料间的距离相应发生改变, 从而产生电信号, 并输出电流/ 电压信号实现传感。
如图1( b)所示,摩擦纳米发电机(TENG)常见的工作模式有四种, 分别是接触分离式(CS)、 横向滑动式(LS)、 单电极式(SE) 以及独立式( FS) 。通过选用不同的工作模式,摩擦电型柔性自供电传感器可以应用在多种场景中。
其中, 接触分离式的 TENG 是由两种具有不同摩擦电极性的材料和位于其背面的电极组成的。在外部压力下,由于接触起电效应,两种材料相互接触从而产生表面电荷, 接触分离式的 TENG 可以更便捷地感应压力的变化。
横向滑动式的 TENG 结构与接触分离式相似, 都是通过摩擦电材料对之间的接触分离产生电荷,但不同之处在于 CS 式需要两种材料在垂直方向上分开, 而 LS 式则是需要两种材料在平面方向上分开。
LS 式的优点在于其工作频率可以很高,且更适应于检测平面的运动。单电极式的 TENG 只有一个电极和一个摩擦层, 它将外部物体(例如人的皮肤)作为另一个摩擦 层与自身进行相互作用。
因此 SE 式的 TENG 可以检测外部对象的运动, 设计成触摸传感器等。并且由于本身的结构简单, 从而可以更容易地与其他设备进行集成。独立式的 TENG 固定了两个电极,外部物体可以在两个电极间自由移动。由于物体可以与电极部分分离, 因此 FS 式的 TENG 适用于检测移动物体的运动。
总的来说,,基于摩擦纳米发电机的柔性自供电传感器具有输出性能高、 成本低、 稳定性高、 响应时间短和灵敏度高等优势。
近年来,随着结构的不断优化和材料的迭代, 摩擦电型的柔性自供电传感器越发向集成化、 小型化发展。
1.3 热电型自供电原理
热电型柔性自供电传感器主要是基于材料的塞贝克效应实现信号传感。如图 1( c) 所示, 其原理简而言之就是导体中载流子能量随温度的变化而正向变化, 温度越高载流子的动能越大。
导体两端接头处温度有差异时, 热端载流子的动能高于冷端载流子, 从而热端载流子向冷端移动。当载流子或载流子浓度达到平衡时, 导体两端便会产生电动势。而衡定塞贝克效应大小的指数为塞贝克系数, 以 S 表示。定义如下:
S = ΔV / ΔT (1)
式中: ΔT 为温度差,℃; ΔV 为温差电动势, mV; 塞贝克系数 S 的单位为 μV / K, 数值的正负取决于 所使用的材料的种类。其中 N 型半导体为富电子材料, 载流子为电子, P 型半导体为富空穴材料, 载流子则为空穴。
因此, 热电型柔性自供电传感器在受到温度刺激时, 就会产生相应的电信号, 从而起到自供电传感的目的.
4 其他
除上述提及的三种自供电机制外, 还有几种自供电传感方法也促进了柔性自供电传感器的发展和应用。例如,基于光伏效应的柔性自供电传感器,其可以利用光能达到自供电的目的; 依据电磁效应等原理制备的柔性自供电传感器, 利用电磁作用实现自供电。
这些研究也为自供电领域提供了更多的选择方案。
二、 柔性自供电传感器常用材料
材料是影响传感器件性能的关键因素,柔性自供电传感器主要由柔性基底、 传感材料以及电极三个部分组成。
2.1 柔性基底
基底材料是柔性传感器的关键要素之一。柔性基底材料要同时具备良好的力学性能、 弯折性、 延展性和轻便性。
在相关的研究中一般使用的基底材料都是商业化的聚合物及弹性体, 如聚对苯二甲酸 乙二醇酯(PET)、 聚二甲基硅氧烷( PDMS)、 聚酰 亚胺( PI) 和聚乙烯醇 ( PVA) 等。例如, Pu 等以 PET 为基底, 以氧化铟锡( ITO)作为电极, 氟化乙烯丙烯共聚物(FEP)和丙烯酸(Acrylic)作为摩擦层构建了基于摩擦纳米发电机的柔性自供电传感器, 可以敏锐地检测压力变化, 在超高信号水平 (约 750 mV)下能够有效地捕捉眨眼运动。
该传感器固定在一副眼镜上, 应用于智能家居控制系统和 无线免提打字系统两种实时机械控制系统中。利用一个简单的信号处理电路实现了智能传感眼镜对家 用电器的控制, 其具有灵敏度高、 稳定性好、 操作简单、 成本低等优点, 如图 2(a)所示。
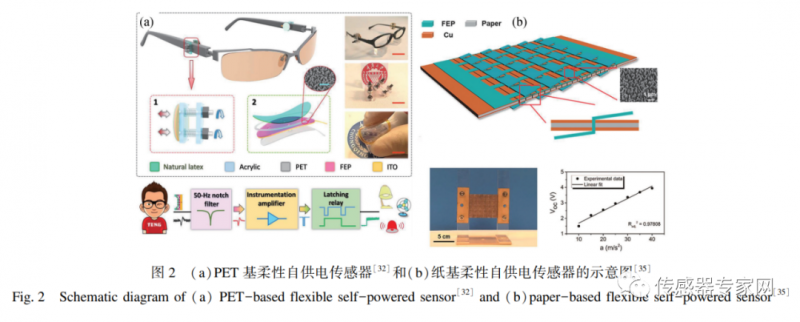
有研究人员利用纸张等生物基纤维材料制备柔性自供电传感器。如图 2( b) 所示, Wu 等[35] 借鉴了 Kirigami 折纸结构, 在纸基材料上构建了由 FEP 和铜箔组成的摩擦纳米发电机。
其可承受高达 100%的超高拉伸应变, 能够从拉伸、 挤压和扭转等各种运动中获取能量。简单的拍手就能产生 115. 49 V 的最大开路电压和 39. 87 nC 的最大转移电荷量。
此外,将设备安装在两块丙烯酸板间可用来检测物体移动时的加速度。传感器的灵敏度为 0. 080 V· s 2 / m,并且在 10 ~ 40 m/ s 2 范围内拥有良好传感性能。高分子材料的优点在于良好的均一性、 柔性和伸展性以及稳定的化学性质等。
纸基材料因为其天然的三维网络结构和不均一性, 使得其表面相对粗糙从而具有良好的吸附性能。相对于 PET、 PVA 等 部分高分子材料而言, 其具备更好的热稳定性。同时由于其原材料来源于天然聚合物, 所以具备高的生物相容性和可降解性, 可以预测未来在基底材料的选择上, 会越发向更天然环保材料的方向发展。
2.2 传感材料
传感材料是柔性自供电传感器最主要的组成部分,在上述的三种类型自供电传感器中, 因各自原理不同, 其选用的传感材料也有所区别。
2.2.1 压电材料
压电材料大致可以分为两类,一种是无机压电材料, 常见的有钛酸锆铅( PZT)、 氧化锌(ZnO)、 钛酸钡(BaTiO3 ) 等。
这类材料通常具备高的压电系数, 但是其固有的刚性和脆性, 使其难以满 足可穿戴设备的柔韧性要求, 因此在柔性自供电传感器中, 此类材料一般需要与柔性材料或基材结合制成柔性复合材料; 另一种压电材料是压电聚合 物, 常见的则是聚偏氟乙烯( PVDF) 以及其共聚物 聚偏二氟乙烯—三氟乙烯( PVDF-TrFE) 等。
此类材料与无机材料相反, 其压电系数相对较低但柔性很好, 因此, 近年来在压电式的柔性自供电 感器的研究中常常将 PVDF 等有机材料与无机压 电材料进行复合, 使其兼具良好的柔韧性和压电性能。
例如, Yan 等通过采用溶胶-凝胶前驱体和煅烧工艺, 利用静电纺丝技术制备了 BaTiO3 纳米纤维, 然后在 PDMS 基纳米生成器中垂直、 水平或随机排列得到 PDMS 基的 BaTiO3柔性复合 压电材料。
如 图 3 所 示, Kim 团 队将 高 度 结 晶 的 BaTi 1-xZrxO3( x = 0, 0. 05, 0. 1, 0. 15 和 0. 2) 纳米立方体(缩写为 BTZO)通过超声波处理嵌入聚偏二 氟乙烯(PVDF)基体溶液中制备了 BTZO / PVDF 的 混合膜。
结合了 PVDF 的柔性以及钛酸钡化合物的 高压电性能, 在满足柔性的同时提高了材料的压 电性能。设备可以在不使用储能设备的情况下同 时点亮 5 个绿色 LED 灯。
另外作为自供电传感器, 其可以在高流体工作温度(高达 120 ℃ ) 和超 高压范围下工作, 并适用于小尺寸的设备。将其安装在出水管口处时, 因水流对薄膜的冲击作用使得薄膜内部发生极化, 使设备两端产生电压, 水的流速越快, 冲击力越强, 产生的电压越大。
当水流速度为 31. 43 ~ 125. 7 m / s 时, 设备的平均 最大峰值功率为 0. 2 ~ 15. 8 nW, 可以准确高效地检测出水的流速。

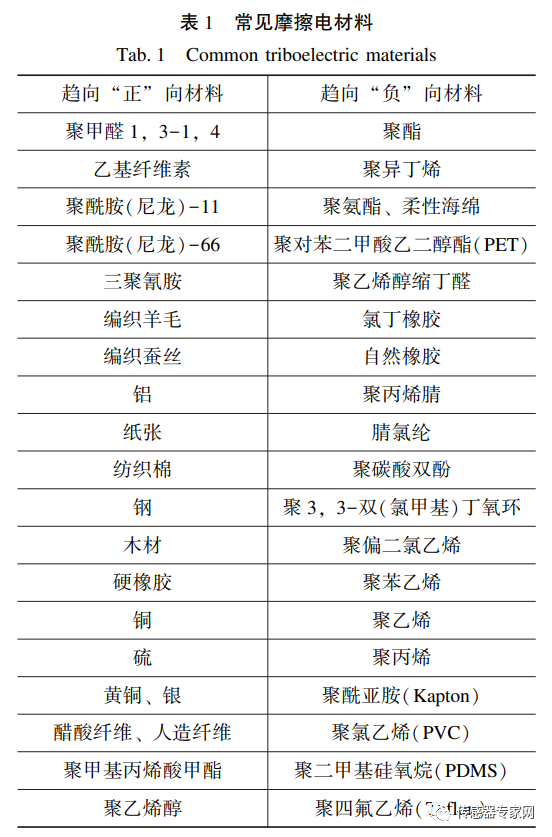
2.2.2 摩擦电材料
摩擦电型柔性自供电传感器根据其结构和发电原理,在材料的选择上采用的标准是其得失电子能力强弱。两个摩擦层材料的电子亲和力差距越大, 则电荷转移率越高, 通过摩擦效应产生的电能就越高。
如表 1 所示,目前,主流的摩擦层材料都是聚合物材料,例如特氟龙( PTFE)、 PDMS、 FEP、 PI 和 PET 等。金属材料例如铝、 铜等也常用来作为 摩擦层使用。
一般而言,摩擦层材料其表面都需要进行粗糙化处理,,粗糙的表面意味着更大的接触面积以及更多的电荷转移, 可以大大地提高摩擦纳米 发电机的灵敏度与输出性能。
通常可以使用激光蚀刻在表面构建微图案, 或者沉积于粗糙的基体材料等方法使材料表面粗糙化。
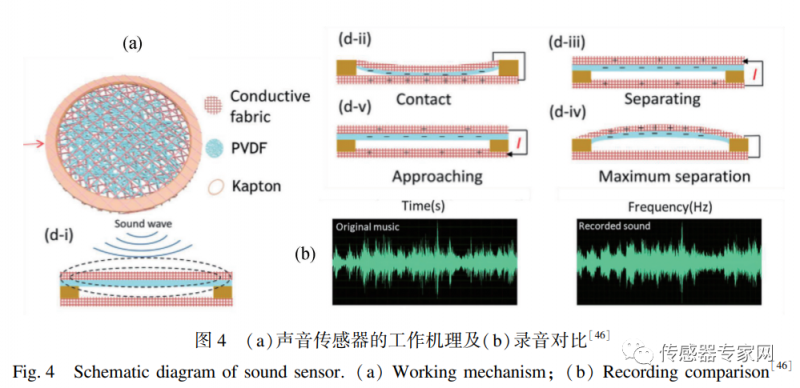
近年来, 诸多基于液体、 导电织物和纤维的摩擦纳米发电机被研究人员发现和关注。例如,王中林团队制备了一种基于静电纺丝的 PVDF 纳米纤维的摩擦纳米发电机型柔性自供电传感器。
其可以从环境中收集声能, 并在 20 ~ 1000 Hz 的频率范围内稳定工作。其独特的结构设计有利于声能捕 获和声压增强。从图 4(a)中可见,声波可以使设备内部的摩擦层材料发生接触分离, 根据摩擦电效应 在上下两层导电纤维上感应出电荷, 使上下电极间产生电流。此设备可以在 170 Hz 的声频和 115 dB 的声压下提供 400 V 的开路电压和 175 μA 的短路电流, 瞬时最大输出功率密度为 7 W/ m 2 , 能够利用收集的声能同时点亮 55 个 LED 灯。
此外, 作为自供电传感器可用于音频分析和噪声检测,能够敏锐地检测声源的方向和运动速度。如图 4( b)所示, 其可以区分不同频率声波产生的电信号, 通过并入 操作系统中可以录制音乐的声波, 与原始声音相比 较非常相似。
2.2.3 热电材料
热电材料主要取决于材料本身的热电性能。目前主流的热电材料分为有机热电材料和无机热电材料两种。无机热电材料主要是一些金属化合物例如碲化铋、 硒化锡、 硅锗合金等。这类材料通常热电性能较好, 但是柔性较差。
相比之下, 有机热电材 料则刚好相反, 具备优良柔性, 但是转换效率低。目前主流的有机热电材料有石墨烯(Graphene)、 碳 纳米管(CNT) 以及聚( 3, 4 -乙烯二氧噻吩) ∶ 聚 (苯乙烯磺酸) ( PEDOT ∶ PSS) 等。
与压电材料类似的是, 近年来热电材料也常常采用无机与有 机材料复合的思路, 制备出的复合热电材料一般都具有不错的柔性, 并在电导率、 转换效率等方面优于有机热电材料。
除此之外, 将热电材料与弹性体材料例如橡胶等聚合物复合,以获取更好的柔性及 拉伸性的方式也逐渐引起关注。
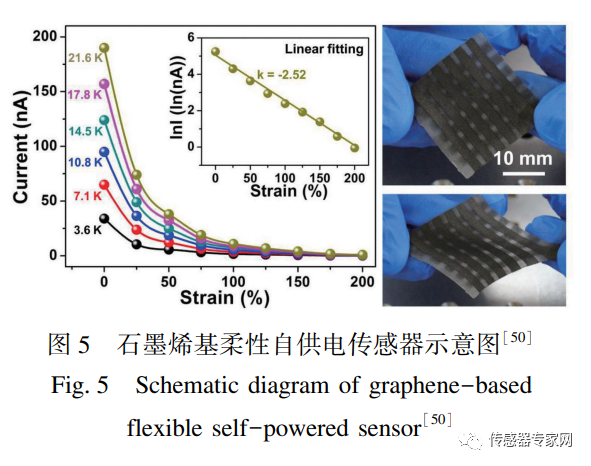
如图 5 所示, Zhang 等将石墨烯与 Ecoflex 复合制备了柔性自供电的应变传感器, 它结合了石墨烯良好的热电性以及聚合物弹性体的拉伸性能, 使其在 0~100%的重复应变下具有 1000 次循环的可重复输出信号, 具有出色的稳定性, 并且应变分辨 率为 0. 125%, 响应时间小于 0. 6 s。
该器件连接到人体皮肤后, 基于人体与外界环境的温差而发生热电效应产生热电电流。在不同应变条件下, 石墨烯的内阻发生变化, 但热电电压不变导致输出电流产 生相应变化。从而可以绘制出电流与应变的关系曲 线, 达到自传感的目的, 并在此基础上进一步制造 了多通道 3D 应变传感器系统, 从而具有检测各个方向应变的功能。
2. 3 电极材料
对于柔性自供电传感器而言,电极的作用是导出电荷, 其本身对传感器性能通常没有太大影响, 电极的选择更多地考虑其柔性、 成本等因素, 有些传感器因为使用环境的问题还会考虑耐腐蚀性、 耐磨性等方面的影响。
在电极中使用最多的是金属薄 膜或碳基材料, 另外导电聚合物或凝胶等也可作为 电极材料。在金属基电极里,铝和铜因其高的导电性和低成本备受青睐, 例如前文中 Wu 等基于纤 维素纸和 FEP 制备的摩擦电型自供电传感器就是使用金属铜作为电极。碳基材料因其相对优良的导电性、 来源广和成本低等特点也成为电极的优良选择。
除此之外, 有研究人员利用银纳米线、碳纳米线等纳米导电材料制备了高性能电极。如图 6(a)所示, Lee 等[52] 将石墨烯作为电极, 制备了一种自供电的可拉伸摩擦电型柔性自供电触摸传感器, 适用于可穿戴设备。
其可拉伸性强, 在 x 和 y 轴方向最大拉伸应变分别为 13. 7%和 8. 8%。并且可以最低检测 1. 3 kPa 的压力, 通过计算电压压力曲线得到灵敏度为 0. 274 V / kPa, 因此可适应皮肤的运动。设备不仅可以感应触摸点位置, 还可以通过改进的功能检测轨迹, 从而具备如触摸滑动速度的检测和信息输入的功能。
2014 年, 斯坦福大学的鲍哲南团队开发出了以碳纳米管为电极的摩擦电型柔性自供电传感器, 它可以分别产生数十伏的电压和十分之一到几微安的电流。作为自供电压力传感器时, 在 1 kPa 以下具有 1. 5 kPa -1的高压灵敏度。如图 6(b)所示, 将设备穿戴在手指上可以轻易识别出手指的运动。
2.4 柔性自供电传感器材料发展概况
通过柔性自供电传感器的三种材料的详述, 发现基底和电极材料在选择上较为常规, 通常只需满 足柔性或导电性等基本要求, 并不受自供电传感器类型的影响。
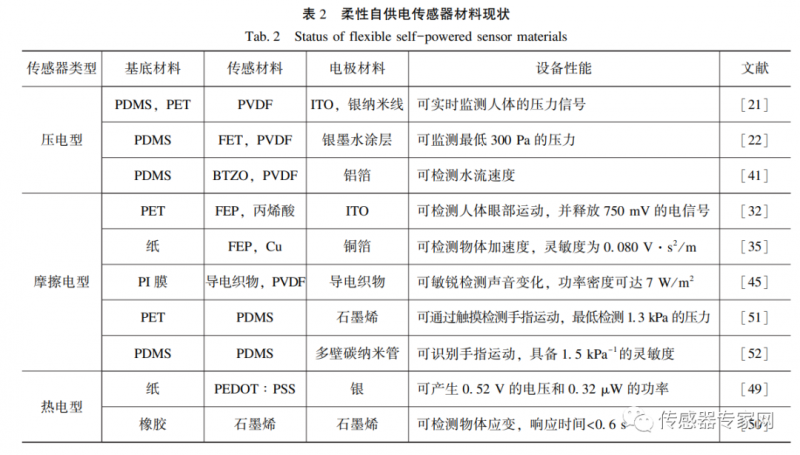
相对而言, 传感材料则是决定设备性能的绝对性因素, 并且不同类型的传感器选用的传感材料也不同, 柔性自供电传感器材料的总结如表 2 所示。
三、 柔性自供电传感器的应用
柔性自供电传感器因其柔性和无需外加电源的特性,具有广阔的应用前景。目前国内外的研究多集中在可穿戴设备和电子皮肤等高精尖领域,另外在环境监测、 体育和游戏等领域也有很好的研究潜力。
相信随着研究的不断深入和进展,柔性自供电传感器的应用领域也会越来越广, 在日常生活中发挥重要作用。
3.1 可穿戴传感器
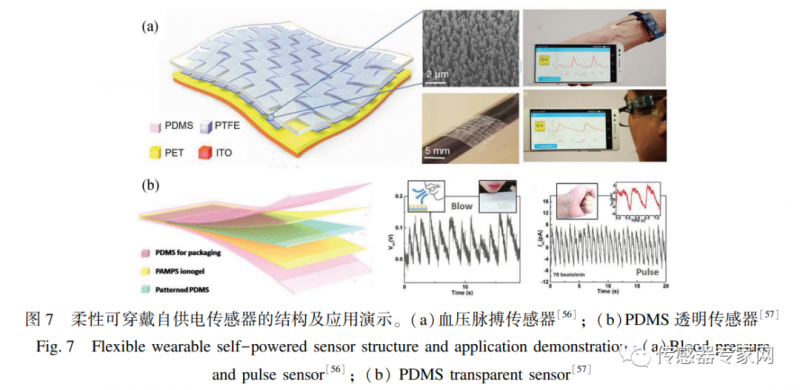
可穿戴传感器是柔性自供电传感器的重要应用方向之一。其常用于健康管理和医疗领域, 如检测脉搏、 呼吸等 。如图 7( a) 所示, 中国科学院的王中林团队基于摩擦纳米发电机制备了柔性的自供电传感器应用在人体上, 可以稳定地测量人体脉搏以及血压。
其使用 PTFE 和 PET 作为两个摩擦层, ITO 作为电极, 最后使用 PDMS 进行封装处理。该传感器具备超高的灵敏度(45. 7 mV·Pa -1 ), 超快速响应时间(小于 5 ms),并且经过多达 40000 个运动循环后未观察到性能下降。且对 100 名年龄 在 24~82 岁健康状况不同的人进行了实际测量。使用该传感器测得的血压结果与商用设备测得的血压 之间差异为 0. 87% ~3. 65%。
2019 年, Zhao 等基于 PDMS 制备了一种完 全透明且高度拉伸的接触分离式的摩擦纳米发电机并用于自供电触觉传感。当设备检测到 0. 1 ~ 1 N 范 围内的冲击力时, 传感器的最大灵敏度为 1. 76 V / N。
在不同的拉伸比(0%, 10%, 50%和 80%应变) 情况下, 摩擦电信号保持了良好的线性相关度, 这使得传感器可以检测各种人体的活动。
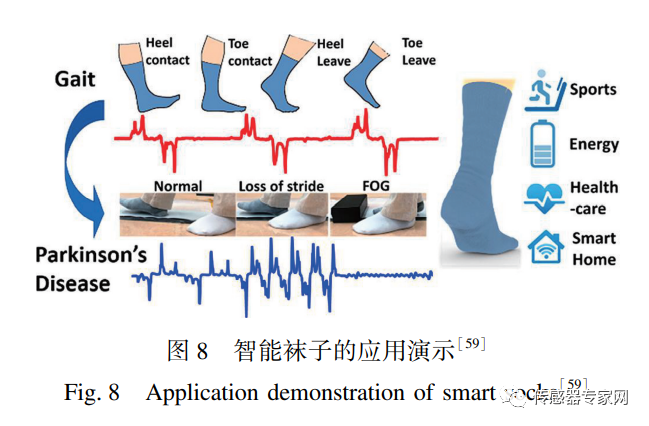
如图 7(b)所 示, 其可以敏锐地响应手指的触碰以及弯曲, 并可 以用来检测呼吸以及脉搏等。除了医疗健康领域外, 可穿戴设备更广泛的 应用是运动检测方面。例如运动计步、 监测步态等。
如图 8 所示, Zhu 等使用 PEDOT ∶ PSS 和 PZT 混合制备了压电与摩擦电复合的智能棉袜, 其中 PEDOT ∶ PSS 编织而成的摩擦织物在人体的 运动中进行摩擦产生电信号。而 PZT 由于其压电 特性被放置在脚跟处, 当穿上此设备后人体的压 力就会使 PZT 基压电模块产生电信号。两种信号耦合不仅加大了电信号并且起到了更精确检测的作用。
3. 2 电子皮肤
柔性电子皮肤已经广泛应用在人体皮肤的触觉以及热感应领域。电子皮肤可以像衣服一样附着在人体或机器人的表面, 并且可以被加工成多种形状以满足应用的需求和模仿人的感官, 从而实现人体生理信息的检测和机器人智能化。
对于皮肤而言, 最重要的是触觉感应和热感应, 因此柔性自供电传感器在此领域广受关注。
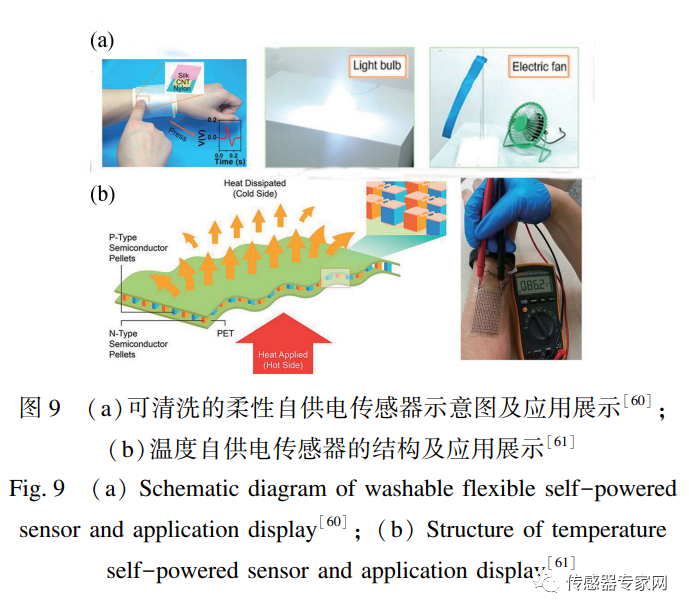
如图 9( a) 所示, Cao 等以尼龙为基底使用碳纳米管为电极, 导电织物作为摩擦层。利用丝网印刷技术制 备出可清洗的摩擦纳米发电机, 并作为自供电的 压力传感器应用在人体上, 实现触控功能。
接入 操作程序后, 通过点按传感器就可以控制电器的 开启或关闭。如图 9(b)所示, Feng 等基于碲化铋制成了 热电型的柔性自供电传感器, 其室温下能够以 0. 5 K 的温度分辨率进行温度测量并且具备约 3. 1 mV 的电输出性能。
使用磁控溅射的方法将铜沉积在 PET 薄膜上构成电极, 制备了 63 对热电单元, 将该设备贴合在人体皮肤上可以利用人体和环境的温 差进行发电, 并且独立地检测温度变化。
3.3 环境监测及其他应用
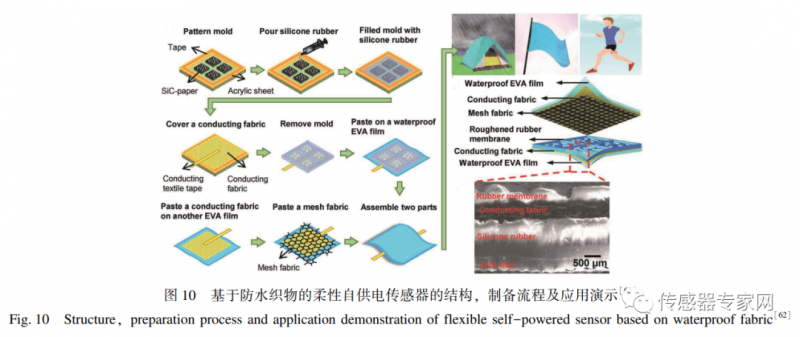
柔性自供电传感器还经常应用在对自然环境的检测中, 例如检测风速、 降雨等。如图 10 所示, 台湾中兴大学的 Lai 等使用表面粗糙处理后的橡胶以及导电织物为摩擦层制备了摩擦纳米发电机型的自供电传感器, 并使用乙烯 -醋酸乙烯共聚物 (EVA)进行封装达到了防水的效果。
设备具备较高的灵敏度, 可以应用在环境监测中。当风速从 4. 5 m/ s 增至 15. 4 m/ s 时, 开路电压从 90 V / m 2 增至 900 V / m 2 。不同角度的吹动, 也会有不同的电压信号产生, 能多方位获取传感信号。
随着柔性自供电传感器的高速发展, 应用领域也在不断地扩展, 最新的研究成果促进了其应用领 域的进一步探索, 例如, 人流量检测、 智能体育领域等 。
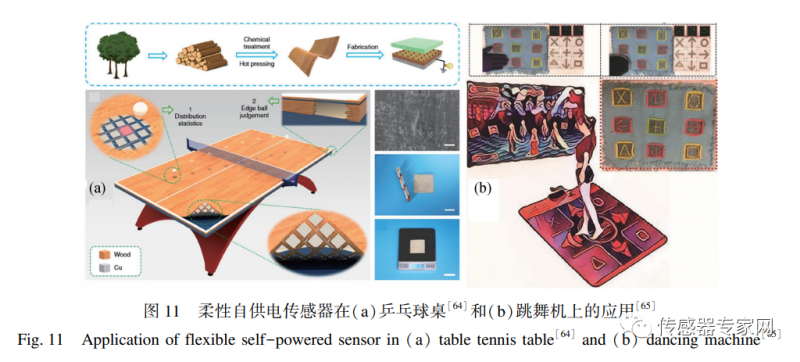
2019 年, Lou 等利用天然木材为原料制备了具有优异机械性能和摩擦电学性能的木材薄膜, 并以此制造了具有柔性、 耐用性的木材基摩擦纳米发电机。其质量轻 ( 0. 19 g)、 厚度薄 ( 0. 15 mm), 用于制成智能乒乓球桌, 具备速度传感、 运 动轨迹跟踪以及落点统计等功能。如图 11(a)所示。
佐治亚理工学院的王中林团队使用不锈钢 / 聚酯纤维混纺纱、 聚二甲基硅氧烷涂层集能纱和 非导电粘合纱研制出了一种具有三维正交编织结 构的纺织摩擦纳米发电机。
其具有机洗性、 可裁 剪性、 透气性等特点, 并且可以主动、 灵敏地监 测人体的运动信号。如图 11( b) 所示, 其被应用在跳舞机上, 根据玩家踩踏带来的压力产生相应 的电信号, 并通过对信号进行处理达到传感控制的目的。
四、 总结与展望
本文主要总结了柔性自供电传感器近期的研究进展, 对其工作原理、 材料及其应用方面做了详细的阐述。
柔性自供电传感器因其无需外接电源的优势, 其材料、 结构以及制备技术方面等成为研究的热点。低成本、 简易、 高灵敏度、 低响应时间以及优良稳定性的传感器被陆续推出, 这些传感器在可穿戴电子设备、 电子皮肤、 环境监测、 运动检测等 领域得到了广泛的应用。
但是, 目前的柔性自供电传感器相对于传统传感器而言还有诸多的不足, 主要有以下几点:
(1)对微弱信号的检测不灵敏。例如大多数压 力自供电传感器都不能检测 1 Pa 以下的超低压, 而这就需要对传感器的结构以及材料做更进一步的 研究。
(2)相对于传统传感器而言, 自供电传感器可 供选择的材料还是相对较少, 所以新材料的研发也 是未来研究的重点。
(3)自供电传感作为新兴的研究领域, 目前在 工业化生产、 大规模制造上还存在许多类似于成本 控制、 工艺转换等问题, 需要在未来的研究工作中 寻找传感器制备的创新解决方案。
(4)在实际应用中, 自供电传感器还面临着器 件面积大、 稳定性和耐用性不高等问题。
总体而言, 柔性自供电传感器用高性能材料、 器件结构设计仍是研究的重点方向, 柔性自供电 感器将朝着多功能化、 集成化和小型化等方向发展, 且在智能交互、 电子皮肤以及可穿戴领域将发挥越来越关键的作用。
