柔性磁化薄膜:机器人获得感官知觉的关键
这是一个机器人不断进入人们生活的时代,不论是在工业制造还是在家居服务,都已越来越多地见到机器人的身影。但想要机器人更好地服务于人,就需要让机器人更高度地仿真于人。比如,赋予机器人感官知觉。
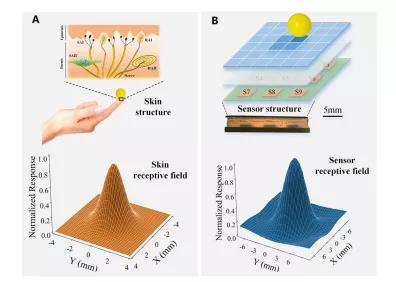
显然,人类的皮肤可以感知法向力和剪切力的细微变化(即自解耦),并能够以更高的分辨率感知刺激(即超分辨)。换言之,人类的指尖可以感受到压力和纹理,这主要归功于皮肤上一种叫做机械感受器的特殊感觉细胞。
这些细胞连同整个神经系统,将来自环境的机械信息转化为信号,结合温度感受器和痛觉感受器,人类就可以在不伤害自己的情况下完成对周围环境的操控。
为了最大限度地在机器人身上实现这一功能的模拟,来自香港城市大学、卡耐基梅隆大学、南方科技大学组建的科研团队共同研发了一种机器人指尖“皮肤”——一种柔软的正弦柔性磁化薄膜,厚度为 0.5 mm,这种薄膜会在设备内部产生磁场。
具体来说,这一复制了他们的机械手指的“皮肤”是由一个灵活的磁化膜组成,它在设备内产生磁场。支撑手指的“骨头”则是一块电路板,上面布满了监测磁场的传感器。
如果把铅笔橡皮戳进指尖,磁性皮肤就会收缩,手指的磁场也会发生微妙的变化,传感器会对这些变化进行分析,以确定橡皮擦的接触位置。如果把这些手指放在一个人形机器人上,机器人就能够定位它的手指与物体接触的地方,从而提高它的抓地力。
研究人员表示,这项工作是令人兴奋的触觉传感新浪潮的一部分,人们正在建造传感器,以提供丰富的原始数据。尽管不一定是为人类消费,但其目的都是帮助机器人解决缺乏灵巧的问题,使人工智能与人类更近。
