机器人落地执行的最优方案
近年来,随着机器人相关产业链的发展与突破,服务机器人在各大应用场景中已实现成功落地。作为一种技术驱动型产业,服务机器人能实现理想落地,核心技术是关键。
解决机器人“会看”的能力
在实现机器人智能行走中,“眼睛”的作用至关重要,作为机器人 “双眼”的激光雷达可帮助其“看清”周围环境。从室内到室外,从机器人到无人驾驶小车再到四足机器人,每一步,都是进步与突破。

各领域使用思岚科技雷达的机器人
实现机器人的同步定位与建图
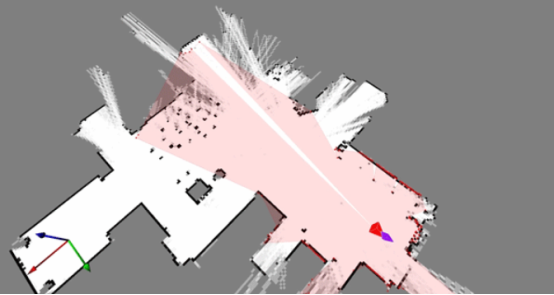
SLAM技术是实现机器人自主移动的关键技术,目前,思岚科技在SLAM技术上已升级至第三代(3.0),采用图优化的方式进行构图,可帮助机器人实现主动式闭环纠正能力,很好的消除长时间运行导致的里程计误差,让机器人拥有探索周围环境的“精准地图”。

SLAMWARE主动闭环修正
帮助机器人有效规避障碍物
在移动过程中,机器人不可避免的会遇到障碍物,这就需要机器人拥有较强的识别和感知能力,确保机器人能准确的进行障碍物规避。
1、自带多种导航算法
思岚科技的SLAMWARE自主定位导航系统自带多种导航和运动控制算法,帮助机器人实现自主导航和障碍物规避,同时,特色的D*路径规划系统,可配合雷达实现边建图边导航。
2、多传感器融合导航
除了激光雷达传感器及SLAMWARE自主定位导航模块之外,还支持接入如深度摄像头、超声波、防碰撞传感器等多种传感器,实现可靠导航,可通过SDK提供的丰富API实现扩展功能。

多传感器融合
应对环境变化及理解环境逻辑的能力
除了障碍物这些“拦路虎”之外,机器人一般还会遇到以下这些情况:
环境出现新变化,如部分区域封闭;
环境中人流太过密集、复杂,使得机器人传感器无法获取与原先地图相似的数据造成定位失败;
环境中出现某个禁区,不允许“闲杂人等”进入;
客户对机器人行走路线有特殊要求,如完成ABC三个点间的巡逻;
这时,SLAMWARE算法就起到了关键作用。首先,全局重定位技术会让机器人有效避障,保证地图不丢失。在“无路可寻“的时候开启自主寻路算法,实现可靠定位导航。其次,“虚拟墙、虚拟轨道”功能能给机器人再加一道“防护墙”,灵活性高的同时又保障性能稳定。

自主巡逻路线设置+虚拟墙
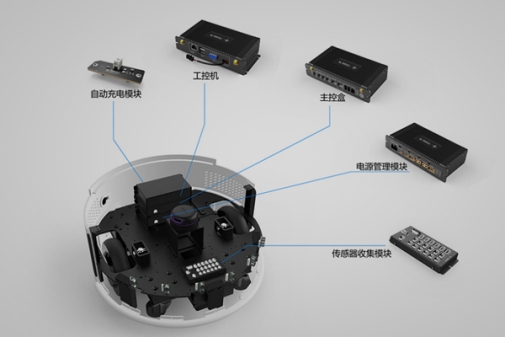
模块化的SLAM Cube
目前市场上的机器人产品没有统一标准,且存在外形、尺寸以及细分需求上的差异,导致开发难、周期长等难题。思岚科技SLAM Cube的出现让企业实现机器人的自主移动,就如同搭积木一样简单,做到标准化,实现快速开发。
至始至终,思岚科技都坚持以技术发展为核心,不断为服务机器人行业添砖加瓦,未来,随着机器人相关核心技术的不断进步及低成本化的普及,机器人将有望走进千家万户。
特别提醒:本网内容转载自其他媒体,目的在于传递更多信息,并不代表本网赞同其观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,并请自行核实相关内容。本站不承担此类作品侵权行为的直接责任及连带责任。如若本网有任何内容侵犯您的权益,请及时联系我们,本站将会在24小时内处理完毕。
