不同类型惯导系统的发展前景——谁是未来的主流?
根据构建导航坐标系方法的不同,惯导系统分为平台式惯导和捷联式惯导系统。
平台式惯导是采用物理平台模拟导航坐标系统,即将加速度计安装在稳定平台上,稳定平台由陀螺仪控制,使平台始终跟踪要求的导航坐标系。
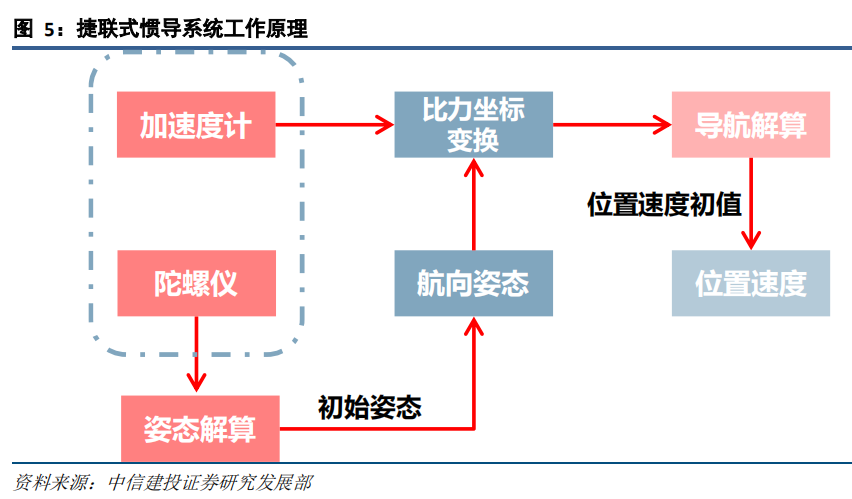
捷联式惯导则是采用数学算法确定出导航坐标系,即将加速度计和陀螺仪直接安装在运载体上,陀螺仪输出用来计算运载体相对导航坐标系的姿态变化,加速度计输出经姿态变化至导航坐标系内。
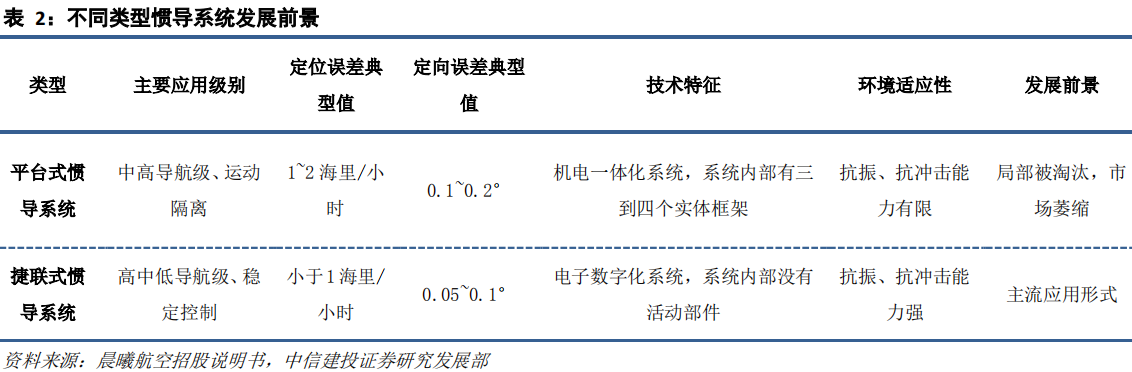
捷联式惯导系统在体积、成本和可靠性方面具有优势,是未来发展的主流形式。
在惯性器件性能要求和计算量等方面,捷联式惯导系统要求更为苛刻,但同时减少对于复杂机电平台的要求。捷联式系统的抵抗振动和冲击能力比较强,在体积和成本方面具有优势,同时由于激光陀螺仪、光纤陀螺仪等惯性器件的出现以及计算机技术的快速发展,捷联式惯导在性能优势也逐步显现。
因此从上世纪 80 年代开始,平台式惯导的开发工作已经基本终止,捷联式惯导将是未来惯导系统发展的主流形式。
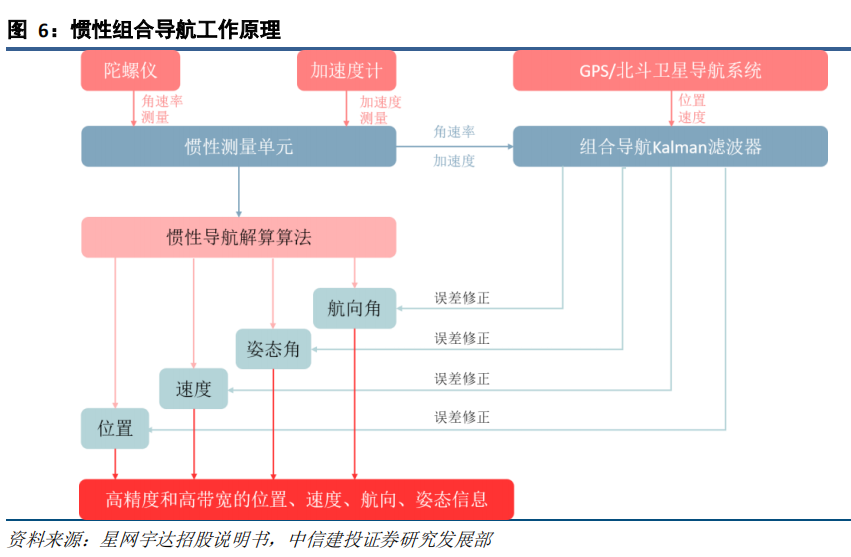
在实际应用中,通常采用惯性+卫星的组合导航方式提高导航系统性能。
由于惯性导航的反馈信息是通过惯性器件测量与算法产生,相对定位误差随导航时间而增加,因此长期导航精度较差;卫星导航采用绝对定位方式,定位精度取决于卫星信号精度,不因时间积累而增加误差。
在实际应用领域,通常采用组合导航方式,即惯性+卫星组合导航来进行实时、高精度定位导航,一方面卫星导航受限于位置和时间,可能存在丢失信号的风险,而惯性导航短期精度高且不受范围的限制,可以适时地对卫星导航信号进行补充;另一方面,惯性导航累计误差高,而卫星导航可以实时更新位置数据,对惯性导航的数据进行修正,从而弥补惯性导航长期精度不高的缺点。
文章内容源自中信建投证券。
