算法如何让高端扫地机器人学会“思考”?
扫地机器人,作为一种便捷的智能家电,正逐渐走入我们的生活。不过,也正因为是一种新兴的智能家居,大多数用户对于扫地机器人的了解也十分稀少。虽然通过商家的宣传,我们能够注意到吸力、地刷设计、尘盒容积等硬件上的差异,但是内部算法的区别长久以来却被忽视,殊不知这其中也有着天差地别。
就如同人类使用扫帚、吸尘器等作为工具一样,对于扫地机器人来说,地刷、尘盒等硬件也只是它所使用的工具而已,作为“智能”的核心,一套成熟的算法,决定着扫地机器人的行为。如何规划路径、如何避免障碍、陷入困境时如何脱离、低电量时该怎么办,如同人类思考一般,这种种决策在机器人的处理器中,其实就是依靠算法来执行。
像是最早的扫地机器人,算法也十分简单。基于随机碰撞理论构建的反馈系统,让扫地机器人像无头苍蝇一样在房间内乱逛,且不说这样会带来多少烦人的杂音和对家具的损坏,仅清扫效率这一项就足以将它从“智能家居”的行列中所剔除。
而如今的扫地机器人,首先有了各种传感器的加持,做到了不用“盲人摸象”一样的四处乱逛,算法的复杂程度也不同以往。
拿当下热门的石头扫地机器人T7来举例,其核心算法就由实时数据管理算法、感知与建图算法、导航与运动算法三大类而构成,而如果细究,又可分为房间分割、特征融合、路径规划...多达29个独立的项目,这些算法同时工作,互相配合,才使得石头扫地机器人T7不仅在清扫时智能高效,更能拥有区域划分,清洁自定义等高级设定项。
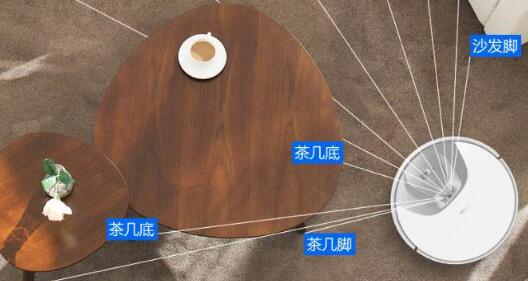
扫地机器人的工作,并不取决于单一的算法,而是众多算法的协调配合。在扫地机器人工作时,可以看到它会优先采用Z字形线路进行清洁,并且优先选择长线作为走直线的路径,减少最费时间的转弯次数,让效率达到最高。
强大的硬件是一款扫地机器人的基础,但同时不要忘了,“聪明的头脑”也十分重要。有了智能的算法,扫地机器人才能做到完全的自主清洁,而不是需要主人忙强忙后,替他操心。
