AGV机器人常见减震浮动结构对比分析

AGV最早源于仓储物流,其中的应用环境条件比较良好,并且AGV的应用场地也有相关的标准定义。随着智能物流的飞速发展,AGV现已涉足制造业、港口搬运、安防巡检等领域,应用的领域范围扩大意味着运行场景的复杂度提升,因此,AGV的适应性能也应当提高。作为AGV的适应结构之一的减震浮动结构,目前,其结构形式繁多,对于不同的 AGV 底盘形式、承载量,减震浮动结构也不同。本文通过列举目前AGV 常见的减震浮动结构形式,加以研究分析其减震的特性,以对AGV 的悬挂浮动系统设计提供特性分析以及理论参考。
大体上来说,AGV的减震浮动结构是要使AGV获得可以在复杂路面上行驶的性能,其具体发挥的作用:
(1)轮系共同着地。在AGV具有多轮的布局轮系中,为保证驱动轮着地,一般的想法是将驱动单元安装得比其他辅助轮凸出来以保证驱动轮的首先着地。但如此一来。辅助轮实际并没有与地面贴紧,导致更多的载荷施加到驱动单元上,降低了AGV的承载能力的同时,AGV的行驶稳定性也会降低。
那么,在上述的基础上,减震浮动结构使驱动单元具有上下压缩的自由度。如图1所示,在驱动轮外凸下,通过AGV的自重将驱动轮压至与辅助轮平齐。通过减震浮动结构来实现多轮共同着地问题,保证了AGV的驱动力外,辅助轮的着地也分担了一部分的承载。
(2)适应不平路面。在AGV的作业环境中,路面的不平会导致驱动轮悬空以致使AGV失去动力或被顶起。减震浮动结构中的弹簧会使驱动轮始终与地面贴紧,遇到凸起路面时,由于驱动单元的浮动性以及弹簧的可压缩性,可避免驱动单元带动AGV整体被顶起。弹簧的反作用力使驱动轮始终与地面贴紧,地面也时刻提供驱动轮支承力以保证具有足够的附着力,保证了AGV不会因路面不平而失去动力。
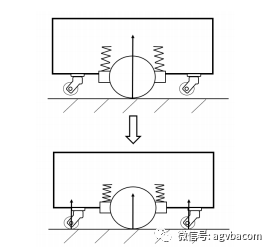
图1 AGV自重将驱动轮压至平齐
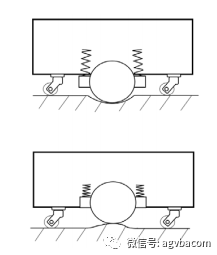
图2 浮动结构的路面适应性
(3)减缓冲击力。路面的不平以及行径方向的障碍物会对驱动单元造成冲击,而减震弹簧将其冲击吸收,有效缓解冲击力对驱动单元的破坏,延长驱动单元的使用寿命。
