哈佛研究人员最新开发出高精度的微型手术机器人
近年来,机器人已经在外科手术中扮演了越来越重要的角色。在拓展医生能力的同时,还可带来更高的手术精度和控制水平。本文要为大家介绍的,就是由哈佛大学怀斯研究所副教授Robert Wood博士开发的一款微型手术机器人。尽管采用了基于平行四边形的基础结构,仅网球般大小的它,还是配备了三套线性致动器,支持旋转、上下移动、以及伸缩等动作。
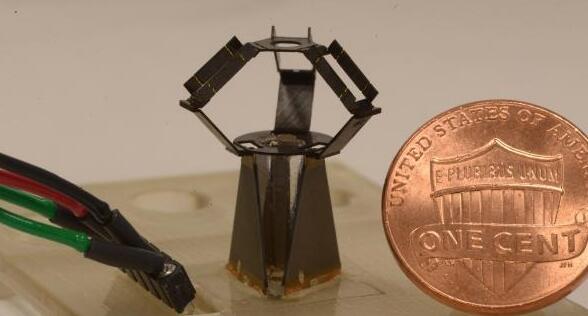
值得一提的是,这款折纸风格的微型机器人,在组装时运用了先进的制造技术。可将材料彼此折叠并激光切割,以打造平行四边形的结构。
另一方面,微型线性致动器采用了压电陶瓷制造,其能够变形以响应电场运动。附带的光学传感器,可确保运动部件遵循所需的路径。
结果就是,研究团队设计出了一款能够执行外科手术任务的微型机器人。作为对比,当前使用的机器很是庞大,甚至需要占用整个房间,且局限于使用较大的工具。
在一项测试中,研究团队让机器人开展了一场模拟的遥控手术,以验证机器人可模拟人类执笔(或其它工具)的动作。
人工需要通过显微镜来定位的一个比圆珠笔尖还小的正方形,这套微型机器人也可以模仿追踪,且精度高出了68% 。
在另一项有关外科医生将治疗剂注入眼球后部静脉的视网膜静脉插管手术实验中(在与静脉一样细小的硅胶管上模拟,厚度约为人类头发丝的两倍),机械手亦能够让针头清爽利落地刺穿,而不会造成任何不必要的损害。
展望未来,研究团队希望通过增加执行器的作用力和定位能力,让这种易于安装和便携使用的微型手术机器人能够发挥更精确的用场。
有关这项研究的详情,已经发表在近日的《自然机器智能》(Nature Machine Intelligence)期刊上。
